News
Elon Musk says SpaceX could build new Moon spacesuits for NASA
A new report from NASA’s Office of the Inspector General (OIG) strongly suggests that spacesuit availability, of all things, could prevent NASA from returning humans to the Moon on schedule in 2024.
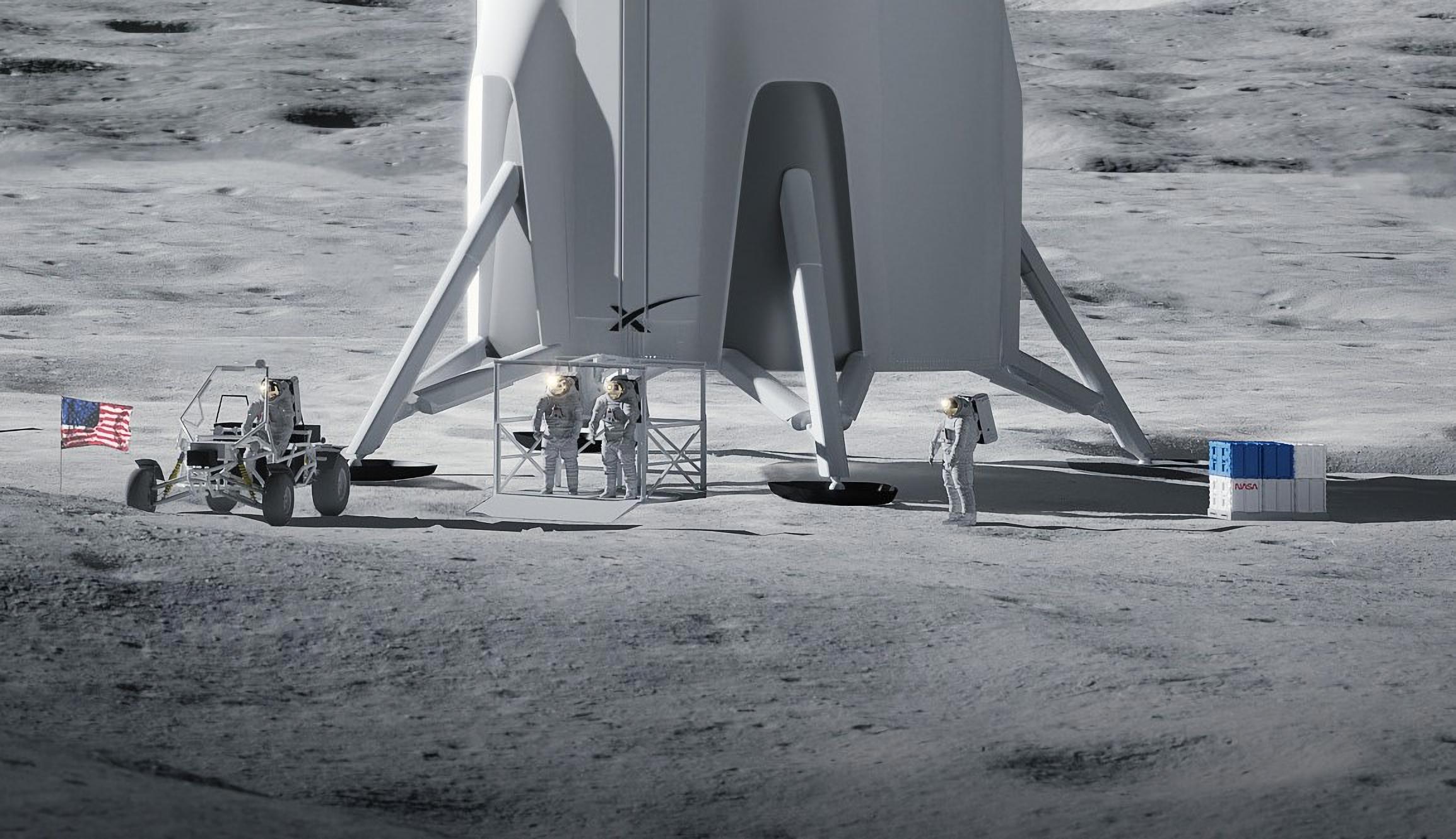
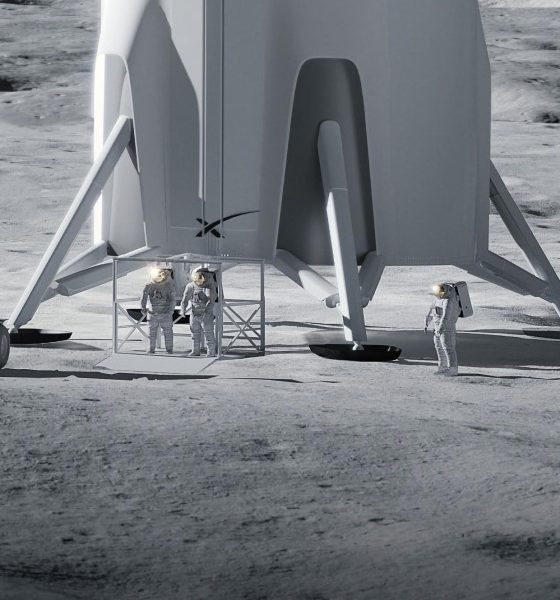
Days prior, a similar watchdog office (GAO) denied protests from Blue Origin and Dynetics that were preventing NASA and SpaceX from working on the Starship-derived lander that will land those same humans on the Moon. Now, in an indirect response to NASA OIG’s analysis of the status of NASA’s next-generation spacesuit procurement efforts, CEO Elon Musk says that SpaceX may be able to provide its own custom Moon-rated spacesuits on top of a Starship lander.
As it turns out, SpaceX is already one of around two dozen “interested parties” [PDF] active in NASA’s new xEVAS (Exploration Extravehicular Activity Services) program – an effort to commandeer the spectacular success of commercial cargo and crew programs to replace half-century-old spacesuits. xEVAS has currently released a draft Request for Proposal (RFP) and is awaiting responses to that draft until mid-August before releasing the true RFP in mid-September.
Interested parties will then have until mid-October to submit proposals to design and build modern EVA (extravehicular activity) spacesuits capable of supporting astronauts on the lunar surface and on spacewalks in Earth orbit. NASA says it will then take a full five (or seven) months to review those proposals, downselect, and reward at least one or two contracts – hopefully resulting in two redundant EVA systems much like the 2+ redundant providers NASA chose to support its Commercial Crew (CCP) and Cargo Resupply Services (CRS) programs.
Over the last decade and a half, NASA has been very gradually working on its own next-generation EVA suits. Known as “xEMU,” the program has been less than smooth, running into multiple issues, funding shortfalls, and delays over the years. NASA OIG’s August 10th, 2021 report [PDF] says that the minimum two xEMU suits needed to support a planned crewed Moon landing as early as 2024 are almost certainly not going to be ready by 2024 after COVID-19, funding shortfalls, and technical difficulties recently delayed the program by almost two years. The office estimates that those NASA-built EVA suits will be ready absolutely no earlier than April 2025.
However, in April 2021, NASA kicked off its brand new xEVAS program – a program that strongly implies that the agency is all but giving up on building its own xEMU EVA suits. While it appears that the agency still plans to build six of its own xEMU suits as a hedge against its innovative, unprecedented xEVAS EVA-suits-as-a-service program, there’s a chance that NASA’s prospective commercial providers could help mitigate or outright prevent spacesuit availability from delaying humanity’s return to the Moon.
Of course, with NASA set to award xEVAS contracts no earlier than either March or May 2022, providers would be left with a mere ~30 months to design, prototype, build, and qualify what amount to personal human-rated spacecraft (EVA suits). According to NASA, “the goal is to achieve one or more EVA service demonstrations as early as 2024, and the full suite of commercial EVA services beginning as soon as feasible thereafter” – an extraordinarily ambitious target.
 -
-
Notably, for its spectacularly successful Crew Dragon program, SpaceX has already developed and repeatedly flown a custom pressure suit for Dragon astronauts. That IVA suit is designed to keep astronauts alive in the event of spacecraft depressurization. Due to the mobility they must provide and a resultant need for light and portable power and life support systems, EVA suits are dramatically more complex than IVA suits, which offer very little mobility when fully pressurized and are permanently connected to their spacecraft through umbilicals.
If anyone can rise to the challenge of developing an EVA suit from scratch in two years, though, it’s likely SpaceX.
 -
-
Investor's Corner
SpaceX and Nvidia team up on Musk’s orbital AI bet
SpaceX revealed a new Nvidia satellite partnership, then Musk pledged an exclusive Nvidia hardware commitment.
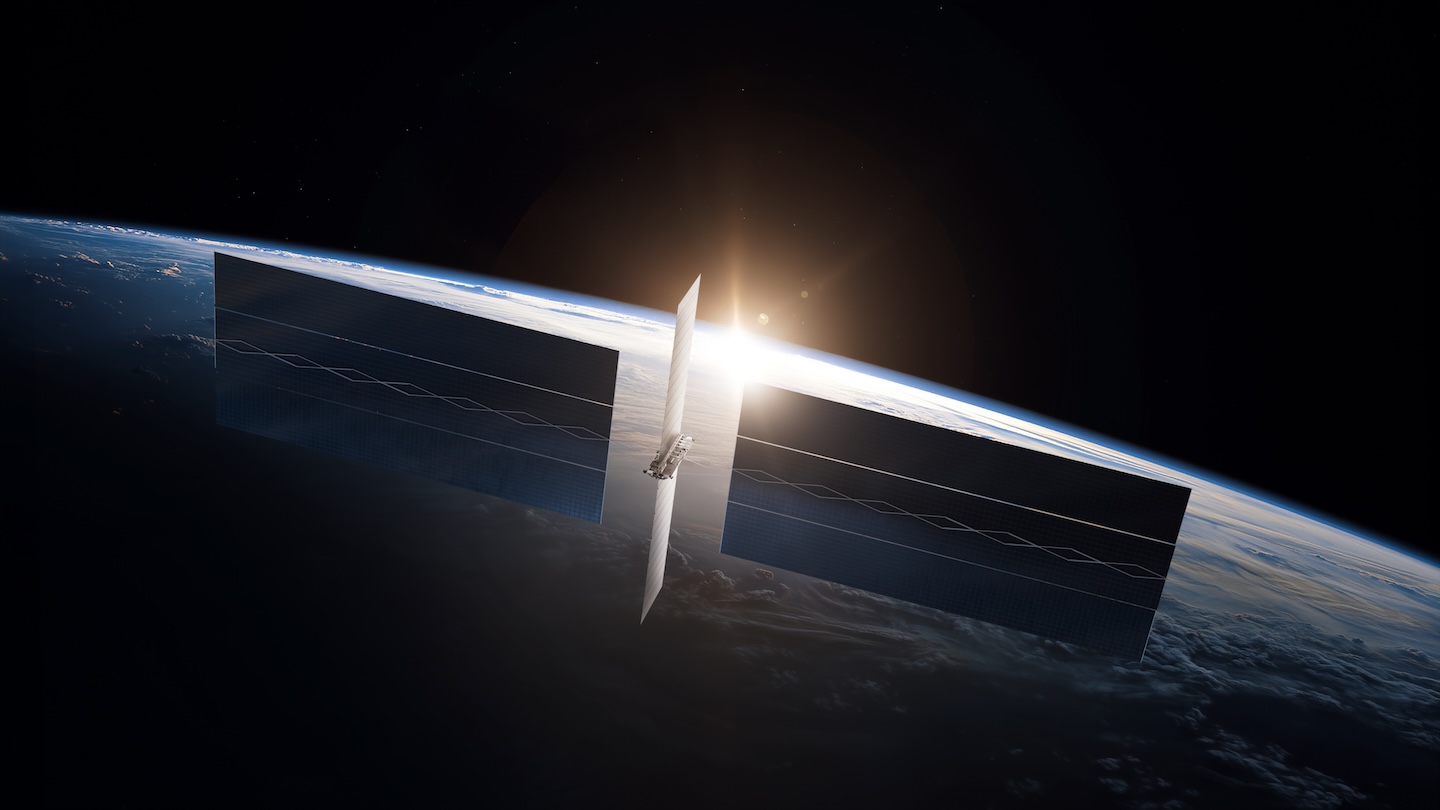
SpaceX and Nvidia are now working together on the hardware that will power Musk’s orbital data center ambitions. SpaceX announced on X on Tuesday that it is partnering with Nvidia to design the compute payload for Starmind AI1, the first satellite in a planned constellation built to run AI workloads directly in orbit. Each Starmind satellite will carry Nvidia’s Rubin GPUs and Vera CPUs, according to the post, which included renderings of the payload design.
The announcement landed hours before SpaceX’s first earnings call as a public company, where Musk went further, saying the company has committed to building its AI infrastructure exclusively on Nvidia hardware. “We think the Vera Rubin architecture is the best architecture. We think it’s the best AI computer, and we greatly value our close cooperation and partnership on many levels with Nvidia,” Musk told investors on the call,. “So we’re exclusive to Nvidia.”
Musk said SpaceX plans to deploy Nvidia’s Vera Rubin NVL72 rackscale system, codenamed Kyber, both on the ground and in space. He set a target of 2 gigawatts of compute capacity online by the end of this year, scaling to roughly 10 gigawatts by the end of 2027.
SpaceX’s newest Starmind will make earth data centers obsolete
Starmind has been in development since Musk confirmed the name in June, following an xAI trademark filing that tipped off the project before SpaceX made it official. The idea is massive in scope and instead of moving data down to ground based servers, satellites equipped with onboard processors and large solar arrays would compute AI workloads in orbit and beam results back to Earth. SpaceX has already filed with the FCC for a constellation of up to one million satellites to support the effort, citing constant solar power and the absence of zoning restrictions as advantages over terrestrial data centers.
The Nvidia exclusivity marks a shift in tone from just two weeks ago, when Musk was busy knocking down a report that SpaceX had ordered $52 billion worth of Nvidia GPUs through Foxconn, calling it fake news at the time. The dollar figure in that rumor may have been wrong, but the underlying direction seems correct. SpaceX’s AI division already leases Colossus compute capacity to Anthropic and Google, and Tuesday’s earnings report showed AI revenue climbing sharply as those deals ramp up.
Nvidia shares rose roughly 3% in Tuesday trading on the news, while SpaceX stock climbed nearly 9% during the day before giving back gains after hours as investors digested the earnings report’s capital spending figures.

SpaceX (NASDAQ: SPCX) reported a beat in revenues and EBITDA in its first earnings call report while also minimizing losses as its business continues to gain momentum.
After its IPO in July, SpaceX saw some tough losses on Wall Street due to a major selloff after a delay in its 13th Starship test flight. The ship launched later that week and completed what was arguably the most successful IFT operation in the Starship program’s history.
Nevertheless, the company is continuing on and reported some encouraging financials while also promoting what appears to be a robust outlook moving forward in its Space, AI, and Connectivity divisions.
SpaceX to report first-ever earnings today: here’s what to expect
Earnings Results
- Revenues: $7.8 billion reported vs. $6.7 billion expected
- Adjusted EBITDA: $3.5 billion vs. $2 billion expected
- Net loss of $541 million, an improvement of $467 million from net loss of $1.0 billion
Additionally, CFO Bret Johnsen had these comments:
“2026 has been a momentous year so far, and the second quarter demonstrated the true power of SpaceX. Revenue growth accelerated across all our business segments and we delivered strong operating leverage, with significant margin expansion led by our new AI compute agreements. Our unparalleled leadership in launch, Starlink subscriber growth, new enterprise and government partnerships, and best-in-class AI infrastructure underscore our ability to drive meaningful scale and deliver attractive returns. As a newly public company, we are delighted to welcome our broad base of shareholders and bondholders. We ended the second quarter with $100 billion of cash, cash equivalents, and marketable securities, and $47.5 billion in backlog. This financial strength gives us substantial capacity to invest in Starship, Starlink Broadband and Mobile satellites, and our AI platform, while maintaining a disciplined long-term capital allocation framework.”
Space Business Highlights
SpaceX shared some of its biggest Space Business Highlights for Q2:
- Space revenues grew 55% sequentially and 29% year-over-year to $962 million, driven by a higher number of large customer launches and a favorable customer shift compared to the prior year
- Total costs and expenses for the Space segment were up by $389 million year-over-year, as we continued to accelerate R&D investments in our Starship program, which we believe will reduce the cost to orbit by 99% or more relative to the historical average, and unlock significant revenue potential across all business segments
- Leading launch provider for the world with 78 launches and 1,041 metric tons of mass to orbit deployed over the six months ended June 30, 2026, primarily allocated to Connectivity for the deployment of our Starlink constellation
- Starship V3 development continued to advance towards full and rapid reusability:
- Completed Starship V3’s first suborbital mission in May, Flight 12, which achieved a successful lift off from our new Starbase pad, a precision landing of Starship’s upper stage, and deployment of modified V2 Starlink satellites
- Subsequent to the second quarter, completed Starship Flight 13 in July, which achieved all flight objectives including deploying 20 production V3 satellites, demonstrating in-space relight of a Raptor engine, and executing the softest ever splashdown of Starship, providing critical views of an intact heatshield
SpaceX will report its earnings today at 4:30 P.M. EDT.

Elon Musk issued a second pointed warning to SpaceX short sellers on Tuesday, just hours before the company was set to release its first quarterly earnings as a publicly traded firm. Responding to a report highlighting elevated short interest, Musk wrote on X: “I try to warn them, but they just double down …”
The comment came as data from S3 Partners showed roughly 95 percent of available SPCX shares to borrow were on loan, translating to about 34 percent short interest as a percentage of the float. The stock has traded under pressure since its record-breaking IPO in June 2026, declining significantly from early peaks.
I try to warn them, but they just double down … 🤷♂️
— Elon Musk (@elonmusk) August 4, 2026
This marks the second such message from Musk in under three weeks.
On July 17, amid post-IPO volatility, he stated: “The survival probability of firms who maintain a significant short position in SpaceX over time is very low.” At that time, SPCX had fallen roughly 30 percent from its peak above a $2.6 trillion valuation, with short sellers reportedly realizing gains of about $8.7 billion.
Musk’s warning aligned with optimistic analyses projecting that Starship-driven cost reductions could enable a multi-trillion-dollar space economy through applications such as orbital solar power, asteroid mining, data centers, and Mars-related projects, positioning SpaceX as critical infrastructure.
SpaceX is scheduled to report second-quarter results after the market close later today, followed by a webcast. Analysts anticipate revenue near $6.9 billion, reflecting growth in Starlink, launch services, and AI-related segments. The earnings release precedes a major lockup expiration on August 6 that could free hundreds of millions of insider shares.
Musk has a long track record of confronting short sellers, particularly regarding Tesla, where he has argued that persistent bearish positions underestimate transformative technologies. Critics view his optimism as overly ambitious given near-term stock fluctuations, while supporters see temporary dips as opportunities in a longer-term expansion of the space economy.
As SpaceX opens its books to public scrutiny for the first time, the high short interest and Musk’s repeated cautions set the stage for heightened market attention on the results and management’s commentary.

SpaceX and Nvidia team up on Musk’s orbital AI bet

SpaceX reports beat in first earnings while minimizing losses





