News
SpaceX’s Starship Raptor Vacuum engine plans laid out by CEO Elon Musk
Elon Musk says that SpaceX Starship engine upgrades are on track to begin static fire tests of a Raptor Vacuum variant as few as a “couple months” from now.
Designed to enable more efficient performance in thin atmosphere or vacuum, Musk admitted that the first version(s) of Raptor Vacuum (RVac) will likely be a compromise between efficiency and speed of development. Nevertheless, the faster SpaceX can prepare Raptor Vacuum for flight, the easier it will be for Starship to begin serious (sub)orbital flight tests.
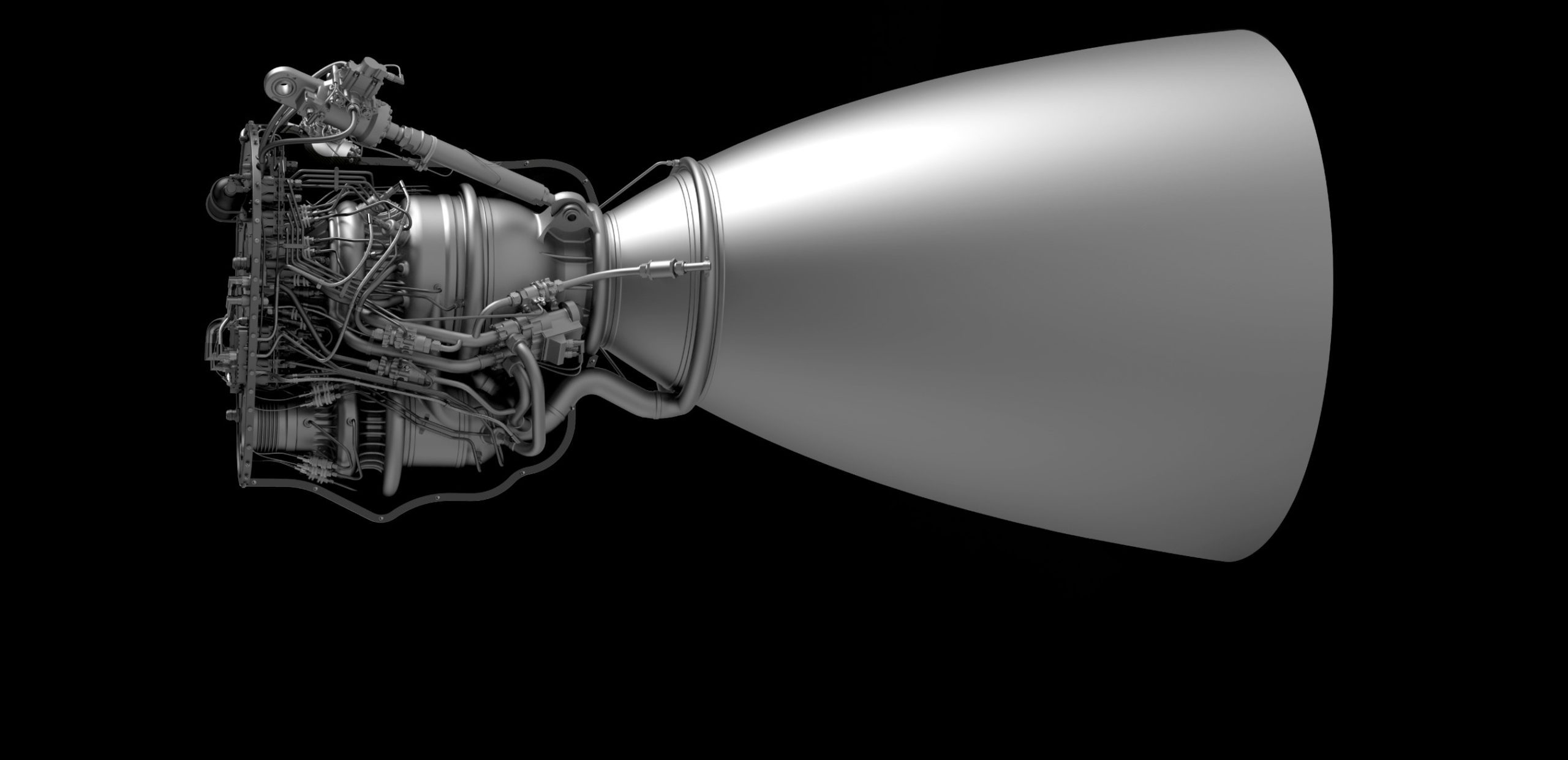
As it turns out, SpaceX’s first and only official render of Raptor – published in September 2016 – showed the engine’s vacuum-optimized variant. In the years since, CEO Elon Musk has vacillated between keeping the vacuum engines as a central Starship feature and simply replacing them with regular sea level Raptors to expedite the spacecraft’s debut. The 2016 and 2017 vehicles featured a mixture of vacuum and sea-level engines, whereas Musk revealed a vehicle with sea-level engines only in 2018.
![]()

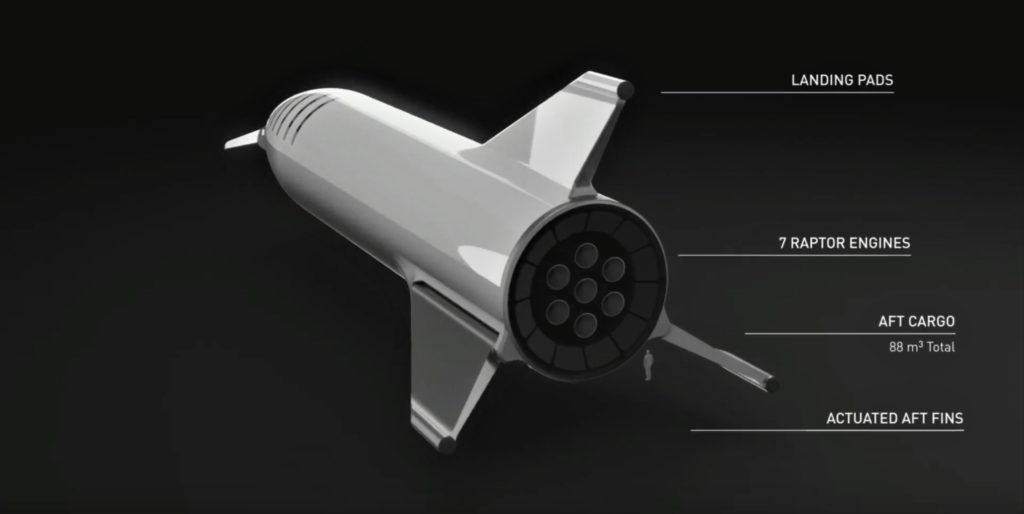
Perhaps less than a month after Musk’s September 2018 presentation, the SpaceX CEO made the decision to radically redesign the vehicle – newly christened Starship and Super Heavy – by moving from a carbon composite aerostructure to stainless steel. At first, the seven SL Raptors remained a part of the design, but Musk took to Twitter in 2019 to indicate that SpaceX had changed gears again and had reprioritized Raptor Vacuum development.
This came as a bit of surprise and it should go without saying that there’s a significant chance that Musk/SpaceX will oscillate in the opposite direction once again before Raptor Vacuum is actually ready for flight. This time, though, Musk has sketched out a development schedule and strategy that suggests SpaceX is much more serious this time.
Most notably, Musk claims that the first Raptor Vacuum prototype could be ready for static fire testing just a “couple months” from now, an immensely ambitious schedule for any large liquid rocket engine development program. Nevertheless, Musk did indicate that the “V1.0” Raptor Vacuum design would be significantly compromised and “suboptimal”, an intentional decision to prioritize the engine’s “speed of development”.
Even then, Musk believes that the first variant – featuring a shortened bell nozzle – could still be up to 12% more efficient than sea level Raptors and thus already 70-80% of the way to the physical limit of methane-oxygen rocket efficiency.
On a positive note, shrinking V1.0 Raptor Vacuum’s nozzle a bit from its nominal length will likely mean that SpaceX can static fire fully-integrated engines at its McGregor, TX test facilities, critical for speedy development. If not, the company has experience with alternatives through Merlin Vacuum, which can only be tested on the ground with its lengthy nozzle detached. This method just makes it dramatically harder to optimize a vacuum nozzle design, as full-scale, flight-like testing is nearly impossible if a given vacuum engine can’t be tested on the ground with said nozzle installed.
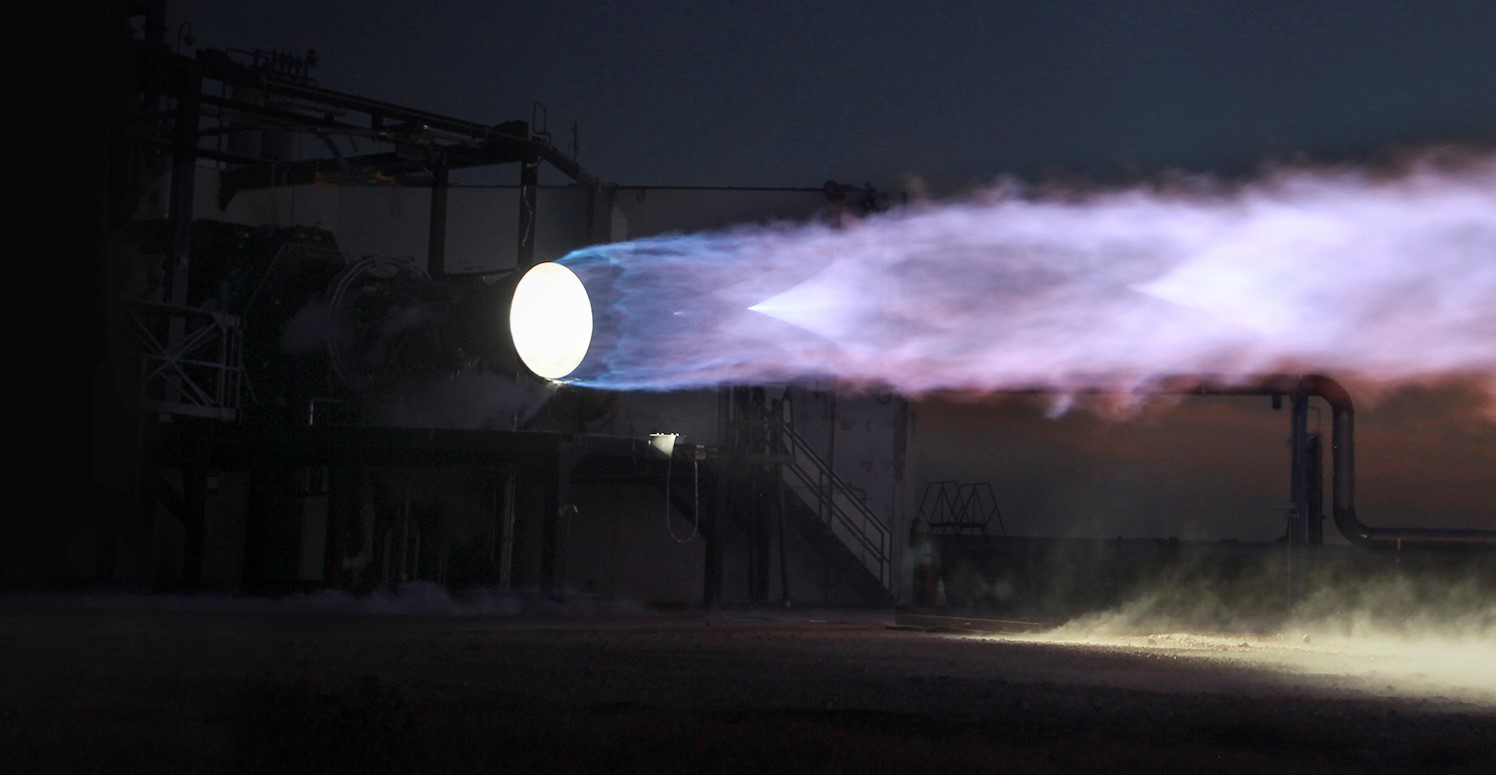
Vacuum engines need such large and unwieldy nozzles in order to make them as efficient as possible. In a very simplistic sense, a rocket engine nozzle directs the flow of superheated, ultrafast gases in order to squeeze as much momentum transfer as possible out of available propellant. The lower the pressure of the surrounding atmosphere is, the more those gases will expand immediately after leaving the nozzle – giant vacuum nozzles simply try to harness the additional momentum available from that extra expansion. This is why rocket exhausts appear to spread and thin out as launch vehicles reach higher and higher altitudes.
In this sense, the perfect theoretical vacuum nozzle is quite literally infinitely long. The job of vacuum rocket engineers is to find the perfect balance between that impractical theoretical perfection and the limits of real-world materials and dynamics. In theory, SpaceX’s sea-level Raptor engines have already been designed to operate in vacuum conditions, while the engine’s closed-cycle design and regeneratively (i.e. propellant) cooled nozzle should apply well to a vacuum design.
If SpaceX is lucky, there will be few roadblocks in the way of simply lengthening a SL Raptor-style nozzle and calling it a day, in which case it would be impressive but not all that surprising if SpaceX is actually able to begin RVac testing before the end of 2019. Once a rough V1.0 engine is in place, the process of optimizing efficiency can be done slowly and methodically, all while exploiting an unprecedented wealth of data from flight and orbit-tested Raptor Vacuum engines.
Check out Teslarati’s Marketplace! We offer Tesla accessories, including for the Tesla Cybertruck and Tesla Model 3.
 -
-

Lemonade has expanded its innovative Autonomous Car insurance program to Tennessee, giving Tesla owners in the state a substantial discount on Full Self-Driving (FSD) miles. Announced on August 3, the product offers 50 percent off every mile driven with FSD activated, positioning the digital insurer as a leader in pricing insurance around autonomous technology.
The program, marketed as Lemonade Autonomous Car insurance, uses a direct connection via Tesla’s Fleet API (with customer permission) to automatically distinguish FSD-engaged miles from manual driving. Policyholders pay a low base rate when the vehicle is stationary and a few cents per mile when moving, with the 50 percent reduction applied specifically to FSD miles.
If you’re driving a Tesla in Tennessee, FSD miles now cost 50% less to insure with Lemonade. Autonomous Car is now live in TN.https://t.co/4CDTuhyORi pic.twitter.com/QZk4LBIs6f
— Lemonade (@Lemonade_Inc) August 3, 2026
Coverage includes standard protections such as liability, collision, comprehensive, roadside assistance, and Tesla-specific benefits like access to certified repair shops and emergency crash services. Eligible vehicles require Hardware 4, as well as recent firmware.
Lemonade first unveiled the product on January 21 of this year, describing it as a first-of-its-kind offering designed for self-driving cars, starting with Tesla FSD. It began rolling out in Arizona on January 26, followed by Oregon about a month later. Subsequent expansions brought it to Indiana in early June 2026 and Colorado later that month.
Tennessee marks the fifth state.
Tesla Full Self-Driving gets outrageous insurance offer with insanely cheap rates
The discount rests on Lemonade’s strong belief in the safety of Tesla’s FSD system. The company cites Tesla’s data showing that FSD-driven miles are twice as safe as those driven manually, or associated with roughly a 50 percent crash reduction.
Lemonade Co-founder and President Shai Wininger has emphasized this distinction: “Traditional insurers treat a Tesla like any other car, and AI like any other driver. But a car that sees 360 degrees, never gets drowsy, and reacts in milliseconds can’t be compared to a human.”
He added that “Teslas driven with FSD are involved in far fewer accidents” and committed that as FSD software improves and becomes safer, Lemonade’s prices will drop further.
Tesla Full Self-Driving gets an offer to be insured for ‘almost free’
This approach leverages Lemonade’s existing pay-per-mile technology and AI-driven risk models, which analyze nuanced vehicle data including software version and sensor performance. The company expects the model to reward higher FSD usage with greater savings while supporting mixed households that include both Tesla and non-Tesla vehicles under one policy. Bundling with home, renters, or pet insurance can yield additional discounts.
As autonomous driving technology advances, Lemonade’s state-by-state expansion of usage-based pricing that directly reflects real-world safety data represents a notable shift in how insurers evaluate risk.
Tesla owners in the five available states – Arizona, Oregon, Indiana, Colorado, and now Tennessee – can obtain quotes quickly through the Lemonade app or website, potentially lowering the overall cost of ownership for vehicles equipped with advanced driver-assistance systems. Further states are expected as regulatory approvals progress.

Tesla has continued to flex the strength, rigidity, and robustness of its all-electric pickup, the Cybertruck. In fact, since 2019, Cybertruck’s ability to avoid dents, dings, and even gunfire has been one of the main selling points Tesla has used to attract buyers who are looking for a vehicle that can handle the most intense challenges.
But that does not mean Tesla is not still actively trying to make it even better.
In a new hardware update, Tesla has decided to change the material of the Cybertruck’s underbody panels from aluminum to carbon fiber, a move that aims to not only increase pricing efficiency but also improve strength.
RELATED:
Cybertruck Lead Engineer Wes Morrill confirmed the change was made to the Cybertruck recently after it was spotted by Coleton Guerin of Out of Spec. This particular trim level was a Cyberbeast, but it is being applied to all trims to keep supply chain efficiency high and have less variance across trim levels.
Morrill said that Tesla tested different materials for the underbody panel protection, and carbon fiber performed better than aluminum, which is what the company was using since its first deliveries in 2023.
Additionally, there are some efficiency improvements because Tesla can better form the areas around the bolts to keep underbody airflow cleaner than previously.
good eye – it’s a new material. Testing showed it to be more durable than the aluminum while being lower weight and cost. Also slight efficiency improvement since we can better form the areas around the bolts to keep the underbody airflow cleaner than what stamped aluminum allows
— Wes (@wmorrill3) July 30, 2026
Carbon fiber is traditionally lighter and more durable than aluminum, which is why it is such a popular material among luxury automakers, and EV makers will utilize some of the materials around battery packs to save weight.
This is the first instance of Tesla utilizing carbon fiber on the Cybertruck’s exterior to help with overall performance and strength. As previously mentioned, Tesla used aluminum to protect the underside of the body, but it is pretty typical for the company to continue making engineering changes that will improve the car in the future.

Tesla released Full Self-Driving version 14.3.7 yesterday, and after about 90 miles of testing today, it is evident there are some definite fixes from version 14.3.6, which I wrote about last week and called a regression.
Within the first 40 minutes of my drive on v14.3.7, it saved me from getting into an accident with an unaware Dodge Charger driver, and some of the things Tesla seemed to miss in v14.3.6 were definitely improved. All in all, the release so far has some really great performance, and I’m looking forward to testing it further.
For now, here’s everything I noticed with v14.3.7:
Overall Improvement
Just generally speaking from a ride perspective, this was a really great experience. A lot of the hesitancy I experienced on v14.3.6 was gone. There were no instances of brake-stabbing, wheel-jerking, or any uncertain or unconfident movements. It was void of anything that I felt made it timid with v14.3.6.
The one thing I do hope to see down the road is a smaller need to adjust Speed Profiles so often. Because Tesla calls FSD “Supervised,” I’m okay with needing to hit the scroll wheel a few times a drive.
However, I hope that things can be incrementally improved upon with speed. Sometimes it’s too fast; other times it’s too slow. It’s a difficult thing to hone in and refine, but I hope it eventually gets there.
I didn’t notice any significant left lane camping or any behaviors that were completely out of line. I am hopeful that this opinion does not change, but after driving a few days with this version and putting it in a variety of different situations, you are exposed to more behaviors, some of which are not necessarily what I’d prefer.
The big things to notice, at least in my experience thus far, are that the major issues with previous versions — meaning the braking stabbing and wheel jerking — simply weren’t there. That’s enough to already consider this progress compared to .6.
Manual Signal Override is More Responsive
On .6, I had quite a few issues with FSD ignoring my manually input turn signals. If Tesla wants to call it “Supervised,” then the car should not ignore any input the driver gives. If I touch the accelerator on FSD, the car speeds up.
🚨 Tesla FSD v14.3.7 obeying manual turn signals https://t.co/6eqToXpQfC pic.twitter.com/vHBlFQ4PDV
— TESLARATI (@Teslarati) August 2, 2026
The car did a great job of obeying my turn signals when I wanted it to change lanes, which is welcome.
Parking Lot Performance
Before .6, I traditionally took over in nearly every parking lot my car entered, because I knew it would not park somewhere that I wanted, and usually, it was just a tad too timid in this setting.
The one bright spot of .6 was how well it handled parking lots. This continued with v14.3.7:
I’m always really happy to see progress at all, but once parking preferences come to FSD, as long as this performance is still around, that could potentially be the biggest improvement I’ve seen in FSD in the year I’ve been using it personally on a daily basis.
Full Self-Driving Averts Disaster
A Dodge Charger changed into my lane without checking if I was there, running me off the road. FSD made the initial avoidance maneuver; I grabbed the wheel out of instinct, looked in my side mirror to ensure I had nobody following closely behind, hit the brake, and straightened the car back up to avoid a curb:
🚨 Guys this is why you all NEED to stay vigilant behind the wheel, even on Tesla Full Self-Driving
Human drivers are UNHINGED and have no idea what they’re doing anymore. This was a kid obviously younger than 20 years old with zero awareness.
First drive with v14.3.7 https://t.co/1vTbCMpCn8 pic.twitter.com/lz7KKEF6bj
— TESLARATI (@Teslarati) August 2, 2026
There have been quite a few responses to this video stating that I should never have grabbed the wheel. To be honest, I really wish I had not done so, because I do believe FSD would have avoided any sort of collision with anything, including the car or the curb.
However, this was the first time I had ever been this close to being hit while using FSD. My natural reaction was to take over. I think if I had had something like this happen before, my reaction might have been different.
Hitting the brake avoided hitting the curb, while FSD swerved to avoid the car. My concern after the car was clear of my front end was the curb. All in all, I’m really happy with how things turned out, and I think anyone could be a critic of how I handled it. I only had a split second to really make a decision, and thankfully, any damage was avoided.
It is clear FSD managed to avoid the car coming down before I was able to. I truly credit FSD for avoiding the collision.
What Needs to Improve
Better Recognition of Potholes, Uneven Roads, Sharp Changes in Roadway/Bumps
On Friday, my Fianceè and I were in the car, and FSD was driving us. We crossed over a roadway that has a traffic light, and FSD was traveling at 40 MPH on Standard, 5 MPH over the speed limit. Everything was more than reasonable.
However, the road we were crossing at the light has a major bump both as you start and finish crossing it. Without a speed reduction, your car can go airborne. The Tesla did just this on Friday on v14.3.6; it was an uncomfortable bounce that pretty much confirmed I would not ever let FSD go over again unless we were sitting at that intersection when there is a red light.
I even tried scrolling down into Sloth quickly, but I ended up just taking over:
This is that big bounce that I mentioned in the quoted post.
It’s just a tad too drastic to take at the speed FSD wants to go over it. You can see me quickly swipe down into Sloth, but I intervened. https://t.co/K20PK9ysBg pic.twitter.com/81Oc82ZJcZ
— TESLARATI (@Teslarati) August 2, 2026
A few people have said it remains related to the vision-based approach and its difficulty comprehending 3D. This is a huge issue because this can cause serious damage at certain speeds.
Navigation
Nothing new here. I still turn off “Online Routing” quite frequently to get the car to take logical routes from time to time.
Auto Wipers
Auto Wipers are just plain bad. I really hope Tesla just uses a rain sensor. I thought they had improved at one point, but I still get dry wipes, Speed 4 on a drizzle, and Speed 2 on a steady rain. In reality, these should be switched.
You can watch our full review of Tesla Full Self-Driving v14.3.7 below:
🚨 Tesla Full Self-Driving v14.3.7 saved me from an accident! FULL REVIEW: https://t.co/1vTbCMpCn8 pic.twitter.com/9mHmKVoMVA
— TESLARATI (@Teslarati) August 2, 2026

Tesla Full Self-Driving insurance program with heavy discount expands

Tesla quietly made the Cybertruck even stronger





