
News
SpaceX installs first ‘Mechazilla’ arm on Starship launch tower
One month after SpaceX stacked Starship’s South Texas ‘launch tower’ to its full height, the company has installed the first arm on what amounts to the backbone of ‘Mechazilla.’
At the end of July, after less than four months of work, a team of SpaceX workers and contractors installed the final prefabricated section of a ~145m (~475 ft) tall tower meant to support orbital Starship launches. Above all else, SpaceX’s first custom-built ‘launch tower’ is a sort of backbone or anchor point for several massive, mechanical arms that will accomplish the actual tasks of servicing – and, perhaps, catching – Starships and Super Heavy boosters.
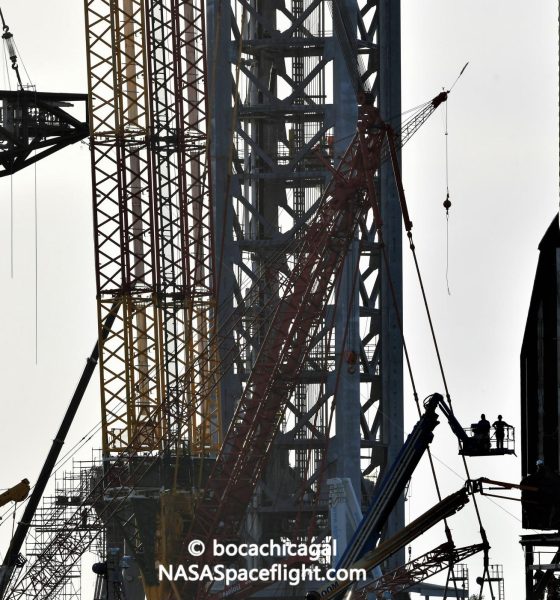
Work on all three of the arms expected to make up what SpaceX CEO Elon Musk has described as “Mechazilla” has been visibly underway since the last week of June as a small army of welders carefully assembled dozens of sections of heavy-duty steel pipe into house-sized frames. Almost exactly two months later, SpaceX has installed the first of those three arms on the exterior of Starship’s skyscraper-sized launch tower.
Known as the tower’s quick-disconnect or QD swing arm, the standalone structure is reportedly designed to accomplish a few different tasks. First, as its unofficial name might suggest, the QD arm will hold a quick-disconnect umbilical connector that will temporarily attach to the base of Starships to load them with fuel, oxidizer, and other consumables and link them to ground power and networking. For years, it appeared that SpaceX planned to fuel Starship upper stages through their Super Heavy boosters, which will themselves be connected to umbilical panels on a table-like launch mount that sits beside the tower.
However, once work began on Starship S20, the first potentially space-capable prototype, it was clear that SpaceX had foregone the umbilical plate normally installed at the base of Starship skirts and moved that connection to the ship’s lower back. Musk later confirmed as much in interviews and tweets, revealing that longstanding plans to dock Starships aft to aft for in-space refueling were also up in the air. As of late, aside from reiterating that the launch pad itself (“Stage Zero,” per Musk) is even more complex and difficult than Starship or Super Heavy, SpaceX’s CEO has also repeatedly stated a desire to offload as many systems as possible onto the launch pad – seemingly regardless of the complexity of the alternative.

Enter the building-sized robot informally known as Mechazilla. While the relatively simple swinging ‘QD arm’ that will fuel Starship and stabilize both stages of the rocket is a common feature of rockets and launch pads, the only experience SpaceX itself has with umbilical swing arms is the Crew Access Arm (CAA) that allows astronauts and cargo to board Dragon spacecraft after Falcon 9 goes vertical – a structure with near-zero umbilical utility. Technically, the transporter/erectors (T/Es) that cradle Falcon rockets, lift them vertical, and fuel them before launch have some similarities with swing arms but SpaceX has always used simpler and more reliable passive mechanisms whenever possible.
A step further, though, SpaceX has also seemingly foregone the installation of a basic crane on top of its Starship tower and Musk himself has developed an almost infamous aversion to the inclusion of something as seemingly simple as landing legs on Super Heavy boosters – and, eventually, perhaps even (some) Starship variants. Instead of adding rudimentary legs to Super Heavy prototypes, Musk has seemingly pushed SpaceX to turn Starship’s launch tower into a complex, vulnerable, and fragile rocket recovery system. Beyond the comparatively mundane QD arm, Musk says that SpaceX will ultimately install a pair of massive house-sized steel arms mounted on a sort of external elevator. Those arms will apparently be capable of actuating and moving up and down the tower with the speed, precision, and reliability needed to quite literally catch Super Heavy boosters – and, eventually, Starships – out of mid-air.
The team tasked with designing and building those rocket-catching arms have affectionately deemed them “chopsticks” – a nod towards the kind of nuanced actuation they’ll need to recover the world’s largest rocket boosters and upper stages without missing or destroying them. Having really only just perfected propulsive vertical landing with Falcon 9 and Falcon Heavy boosters, SpaceX thus intends to throw a few extra points of failure into the mix.
To SpaceX and Musk’s credit, whether the company’s second attempt at catching rockets goes as well as the first, some version of the massive ‘chopstick’ arms SpaceX is working on was likely going to be necessary just to rapidly turn around boosters and Starships – and do so regardless (within reason) of weather conditions. By replacing a tower crane with giant arms, SpaceX will hopefully be able to stack Starship on Super Heavy (and Super Heavy on the launch mount) even in the high winds that are almost always present on the South Texas Gulf Coast. If SpaceX can also reliably catch boosters with those arms, it could be a significant upgrade for the operations side of Starship reusability. For now, though, only time will tell.

Just hours after Starship Flight 13 achieved a successful soft splashdown of its upper stage in the Indian Ocean on July 24, Elon Musk announced an ambitious next step for the company’s next launch of the rocket.
“Unless we discover problems after mission data review, SpaceX will attempt to catch the ship with the tower on [the] next flight,” the SpaceX CEO posted on X on Friday.
That “next flight” is expected to be Flight 14. The plan involves returning the Starship upper stage, commonly called the “ship,” to the Starbase launch tower in Texas and catching it mid-air using the same mechanical “chopsticks” arms that have already proven themselves with the Super Heavy booster.
Unless we discover problems after mission data review, SpaceX will attempt to catch the ship with the tower on next flight
— Elon Musk (@elonmusk) July 25, 2026
A successful catch would mark the first time an orbital-class upper stage has been recovered this way, advancing SpaceX’s goal of full and rapid reusability for the entire vehicle.
SpaceX has already demonstrated the tower-catch technique multiple times with Super Heavy. The first successful catch came on Flight 5 in October 2024, when Booster 12 was plucked from the sky by the Mechazilla arms. Subsequent flights, including those involving Boosters 14 and 15, repeated the feat. Several of those recovered boosters were later inspected, refurbished, and flown again, proving the system’s viability for quick turnaround.
Traditional reusable rockets, such as SpaceX’s own Falcon 9 or Blue Origin’s New Shepard, land on legs either on land or droneships. Rocket Lab has recovered its small Electron first stages by helicopter, but those are far lighter vehicles.
SpaceX Starship just nailed something it’s never done before
The China Academy of Launch Vehicle Technology (CALT), a subsidiary of the China Aerospace Science and Technology Corp. (CASC), completed a catch of its booster on July 10. They are the only entity besides SpaceX to attempt and complete the feat.
Flight 13 provided encouraging data. The ship executed a controlled reentry, flipped, and soft-landed intact in the ocean after deploying Starlink satellites, offering the first clear post-splashdown views of an undamaged heat shield. The Super Heavy booster, meanwhile, experienced a harder splashdown in the Gulf of Mexico.
Musk has previously stressed that ship catches would only follow multiple successful soft ocean landings to minimize risk of debris over land.
If Flight 14 succeeds, SpaceX would take a major stride toward routine, rapid reuse of both stages—critical for lowering launch costs and supporting ambitious plans for lunar and Mars missions. For now, teams are reviewing the Flight 13 data. Should everything check out, the next Starship flight could deliver one of the most spectacular recoveries in aerospace history.

In a move echoing its earlier commitment to open innovation, Tesla CEO Elon Musk announced recently that the company plans to make the design and software of its Model S and Model X fully open source.
This follows the same approach Tesla took with its original Roadster, releasing all available design, engineering, and diagnostic materials in November 2023 so that “whatever we have, you now have.”
Just as Tesla made the original Roadster design & software open source, we plan to do the same with Model S & X
— Elon Musk (@elonmusk) July 24, 2026
The Model S, introduced in 2012, was Tesla’s first mass-produced vehicle and a groundbreaking luxury electric sedan. It offered impressive range, rapid acceleration, and over-the-air software updates that redefined expectations for electric cars.
The Model X, launched in 2015, built on that foundation as a high-performance electric SUV notable for its distinctive falcon-wing doors, spacious interior, and advanced safety features. Both models served as flagships that helped establish Tesla as a leader in the EV industry and popularized long-range battery-electric vehicles.
Production of the Model S and Model X was wound down earlier in 2026, with manufacturing ending in the second quarter. Tesla redirected the Fremont factory space previously used for these vehicles toward higher-priority projects, including Optimus humanoid robots and the Cybercab autonomous vehicle.
By the time of Musk’s open-source announcement, custom orders had closed and only remaining inventory was available.
Open-sourcing the designs and software offers several clear advantages. Owners of these aging but still capable vehicles gain better access to technical documentation, diagnostic tools, and software resources, making independent repairs and modifications easier and more affordable.
Independent repair shops and third-party specialists can support the large existing fleet without relying solely on Tesla’s service network. Enthusiasts and engineers can study real-world implementations of Tesla’s battery, powertrain, and software systems, potentially accelerating broader industry progress in electric mobility.
The step aligns with Tesla’s 2014 patent pledge and its overall mission to advance sustainable transport by sharing hard-won knowledge rather than locking it behind proprietary walls.
By releasing these materials now that the models have left production, Tesla ensures continued support for its early adopters while freeing internal resources for future technologies. The open-source release of the original Roadster already enabled simulations, community projects, and deeper technical understanding.
Extending that practice to the Model S and Model X should deliver similar benefits on a larger scale, helping keep these influential vehicles relevant and repairable for years to come

Tesla flexed one incredible Robotaxi metric during the Q2 Earnings Call that skeptics have to hate to hear. The company’s platform has already driven more than 380,000 miles of unsupervised ride-hailing across several states with no notable incidents.
During the company’s Q2 Earnings Call on Wednesday, Vice President of AI, Ashok Elluswamy, said:
“First of all, I’d like to state that the Robotaxi program has been operating extremely well. Especially in terms of safety, the program has had an impeccable safety record. We have driven more than 380,000 miles of unsupervised Robotaxi, now across six cities in two different states. We have had zero notable incidents. Any reports have been of other actors impacting us when we were stationary. I like to emphasize how safe the operation has been so far. Zero notable incidents over 380,000 miles.”
Elluswamy’s claim over Robotaxi miles is a significant milestone for Tesla in the grand scheme, especially considering this is a sizeable number of miles without any incident.
0 notable incidents across over 380,000 miles traveled by Robotaxi
— Tesla (@Tesla) July 22, 2026
Tesla’s self-driving approach is much different than that of other companies. Tesla has maintained that vision is the only thing needed to have a solid and effective self-driving suite. Many self-driving companies utilize things like LiDAR, sensors, and other elements to improve performance, but Elluswamy sent a jab at those who believe it’s needed.
“Historically, the so-called experts have always claimed that you need LiDARs, radars, HD maps, and the entire kitchen sink to drive safely. Here we show that such is not true. You can have safe, comfortable, and affordable autonomy with just cameras. This record should be a huge validation of Tesla’s entire AI approach.”
The feat of accumulating this many miles without any driver behind the wheel is impressive. The thing is, Tesla is also doing this across several different locations, with varying traffic rules, pedestrian levels, weather patterns, and other important factors.
While Tesla is not ready to roll out an unsupervised platform completely, it is a slow but steady indication that the company is well on its way to figuring things out.
The company’s attitude toward expansion is slow, safe, and controlled, and despite this huge milestone, it will still be some time until we see Tesla truly unleash unsupervised rides more aggressively.

SpaceX wants to catch Starship for launch 14, Elon Musk says

Tesla to open source Model S and Model X designs and software






