
News
SpaceX’s second Super Heavy booster might land in Mechazilla’s arms
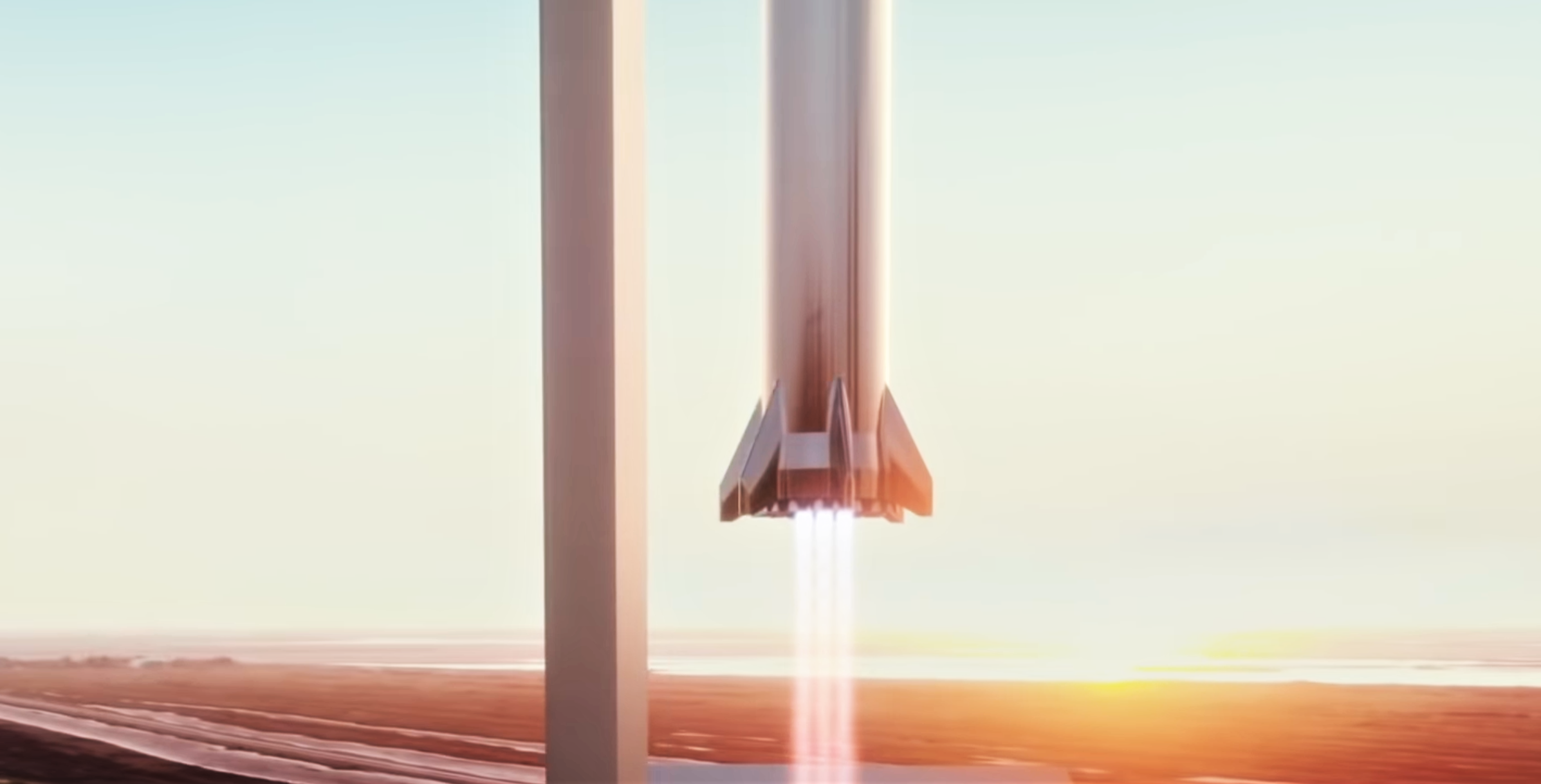
CEO Elon Musk says that SpaceX could attempt to catch a Super Heavy booster out of mid-air with a tower-sized ‘Mechazilla’ robot as early as Starship’s second orbital launch attempt.
Speaking on Twitter just hours after SpaceX installed said Starship launch tower’s first arms, Musk has thankfully answered a question on the minds of many: how many prototype boosters must be expended? In a move that can be only described as unexpected, SpaceX revealed plans to fully expend its first orbital-class Starship and Super Heavy booster pair in May 2021 FCC filings, confirming (or strongly implying) that no true recovery attempts would be made.
Instead, in what could be described as a quasi-orbital debut, SpaceX intends to launch the first two-stage Starship to an altitude of around 200-300 km (TBD). Like many Falcon boosters, Super Heavy will separate a few minutes after liftoff, flip around, and boost back towards the South Texas coast, where it will attempt a soft landing 20 miles offshore in the Gulf of Mexico. Reading between the lines of Musk’s latest info, depending on the results of that ocean landing attempt, SpaceX might attempt to catch the second flightworthy Super Heavy booster on the very next launch.
Heading towards a similar fate, Starship will continue onwards and upwards like a Falcon upper stage. Based on its FCC application, SpaceX seems to have implied that Starship will stop just short of true orbit – traveling slow enough to passively reenter Earth’s atmosphere before completing a full trip around the planet. Of course, it’s possible that SpaceX simply left out plans for an intentional deorbit burn, but it does make sense that the company might try to lock in safeguards for such an ambitious inaugural test flight.
In other words, if Starship were to fail during the ~80 minutes it would spend coasting in space, its launch trajectory design would more or less passively prevent a Russian roulette scenario reminiscent of China’s recent spate of uncontrolled reentries. The feats facing Super Heavy are thankfully a fair bit simpler, though Starship booster recovery does pose its own hurdles.
In an apparent effort to reduce risk, SpaceX intends to fully expend the first flightworthy Super Heavy (potentially Booster 4) and all 29 of its Raptor engines. There will be no attempt at all to land the booster or its one-of-a-kind engines at land or on a sea-based platform – partly because Elon Musk appears to have endeavored to entirely prevent the installation – and, perhaps, the design and assembly – of legs. Instead, in one of the eccentric executive’s less intuitive gambles as of late, SpaceX will entirely dispense of more than half a decade of experience landing 90+ Falcon boosters on legs to attempt to catch Super Heavy boosters out of the air with house-sized arms tacked onto a 145m (~475 ft) tall tower.

No different than a hypothetical landing with legs, Super Heavy will still have to boost back to land, coast, and fire up several Raptor engines for a final landing burn – only on tiny handle-like hardpoints and giant moving arms instead of legs and a concrete pad. If catching boosters eventually proves reliable enough to be a worthwhile reinvention of the wheel, the only apparent benefit of the approach will be a slight reduction in Super Heavy’s dry mass.
According to Musk, though, SpaceX might not have to wait long to find out just how viable a recovery method ‘Mechazilla’ really is and will “hopefully” attempt to catch Super Heavy Booster 5 (B5) after Starship’s second orbital launch attempt. Presumably, that attempt is contingent upon FAA approval and on Booster 4 successfully simulating a smooth, accurate landing in the Gulf, as even a minor issue during a catch attempt could catastrophically damage pad hardware that would take months to repair or replace.
 -
-
For now, it’s almost impossible to say when Starship S20 and Super Heavy B4 will be ready for their orbital launch debut, as that now lies almost solely in the hands of the FAA. In theory, the FAA could complete environmental reviews and grant SpaceX a launch license as few as two or so months from now. In practice, SpaceX could be forced to sit and wait for at least 6-12 more months. Regardless, SpaceX has already begun assembling and staging sections of Ship 21 and Booster 5, so the company could be ready for an extremely rapid turnaround (and Mechazilla’s first catch attempt) after Starship’s orbital launch debut – whenever that may come.


The Trump Administration today made several key moves to help with the deployment of autonomous vehicles by cutting overreaching red tape that has stifled growth and innovation for years.
The moves, which were put forth by the National Highway Traffic Safety Administration (NHTSA), aim to grant temporary exemptions to at least one company currently, although that could expand in the coming months. Additionally, it will work with organizations to develop standards and a sound but efficient regulatory landscape.
Zoox is the only company mentioned explicitly by the Trump Administration in its press release announcing the new terms today. They will receive a temporary two-year exemption that will allow the commercial deployment of up to 2,500 vehicles annually for two years.
There is a potential exemption for Robomart, Inc., which “requests a temporary exemption from certain FMVSS No. 500 requirements for a low-speed vehicle operated by an ADS without a human driver onboard. NHTSA will publish a separate notice seeking public comment on its merits once the initial evaluation is complete,” the agency said.
Here are the five new terms that Secretary Sean Duffy has implemented through the NHTSA today:
- Allow Zoox to commercially deploy its robotaxis through a temporary exemption.
This temporary exemption will allow the commercial deployment of up to 2,500 vehicles annually for two years, subject to an enhanced, adaptable oversight structure that can evolve as Zoox’s technology advances. - Accelerate development of first-ever AV performance standards through a partnership with SAE Industry Technologies Consortia (ITC).
This partnership will fund a three-year, $5 million “A2SCEND” consortium, bringing together experts to gather data and accelerate creation of the first-ever AV performance standards. This project will inform a single national standard for AV safety to eliminate the patchwork regulatory landscape that has stifled innovation for years. - Publish an interim final rule that allows vehicles manufactured prior to an exemption to be eligible for a commercial deployment exemption.
This rule will modernize the application process and improve access to exemptions for innovators, including AV developers, by granting the NHTSA Administrator the discretion to apply temporary exemptions to vehicles manufactured prior to the effective date of an exemption grant. - Streamline the application process for Part 555 exemptions by updating guidance and soliciting feedback from the public.
By updating the Part 555 exemption process—which allows automakers to temporarily sell a limited number of non-compliant vehicles, primarily to test new technologies—NHTSA is aiming to create a more flexible oversight structure for exemptions and summarize recent AV framework activities, including expanded exemption pathways, streamlined crash reporting, and ongoing efforts to modernize Federal Motor Vehicle Safety Standards (FMVSS). - Establish a new Federal Docket for public feedback on NHTSA’s updated safe AV development and deployment guidance.
NHTSA is updating its technical guidance for AVs for the first time since 2017—focusing on key safety areas like emergency responder interactions, safety management systems, remote assistance, and post-crash behavior to help the industry scale up driverless deployments safely.
Additionally, the NHTSA said it has modernized some safety standards by proposing updates to:
- FMVSS 102 – Transmission shifting
- FMVSS 103/104 – Windshield defrosting and wiping
- FMVSS 110 – Tire placards
- FMVSS 135 – Braking systems
- FMVSS 101 – Controls and displays
- FMVSS 108 – Vehicle lighting
- FMVSS 111 – Mirrors and rearview display
- FMVSS 126 – Electronic stability control systems
- FMVSS 201/208 – Sun visors and warning labels
These changes aim to make the regulatory process for autonomous vehicles more streamlined and efficient, which could help the U.S. gain dominance over autonomous vehicle systems moving forward.

Elon Musk is, in many respects, one of the biggest and most influential figures in modern-day artificial intelligence.
Given that Tesla, SpaceX, and xAI are all looked at in their respective fields as leaders to an extent, each of them has a heavy influence on the future of AI, even though two of them are not thought of, at face value, as AI companies.
Musk has grand expectations for what is to come with AI, not only as a form of assistance to make human lives easier, but to make humans multiplanetary and solve some of the biggest issues that face us today. But even he is astounded by AI’s pace of progress.
He believes that in two years, AI will be so mind-blowing it might be unrecognizable.
Given that AI from 2 years ago feels so old that it should be in a museum, then obviously AI 2 years from now will be mind-blowing https://t.co/TcsKZ8o8OE
— Elon Musk (@elonmusk) July 30, 2026
This progress can be seen in a variety of ways, but perhaps the most popular way people have shown AI’s progress, especially on social media, is through an incredibly arbitrary way of watching Will Smith eat spaghetti:
The progression in AI of Will Smith eating spaghetti (2023 – 2026) pic.twitter.com/VDv82mB5gs
— internet hall of fame (@InternetH0F) February 10, 2026
This is a great way to show people how AI is improving, especially from a perspective that examines how it can manufacture images and video from prompts. AI is an incredibly complex concept, however, and it goes much deeper than Will Smith eating Italian food.
Musk’s most widely adopted method of AI is likely Tesla Full Self-Driving, which impacts millions of people as they utilize it to increase safety with their travel. Musk has routinely pushed incredibly aggressive timelines for self-driving, especially unsupervised.
Perhaps this perspective is why he feels that things will be solved in a timeframe that is much more aggressive than most of us would think. Regardless, the progress of AI is moving fast, and it seems that Musk’s expectations for it could be high.
But if it can actually achieve full-length motion pictures and even more realistic production value, it will be hard to distinguish between reality and AI very soon.

Tesla just officially confirmed it has built its 10 millionth car, a major milestone for the company that started producing sustainable electric powertrains less than two decades ago.
In that time, Tesla has truly revolutionized the automotive industry, disrupting the idea of what a car should be, how it should be fueled, and how it truly impacts day-to-day life.
10 million vehicles produced globally.
Congrats to all Tesla teams! pic.twitter.com/JkcraR63bs— Tesla Manufacturing (@gigafactories) July 30, 2026
Tesla achieved this feat across four production facilities: the Fremont Factory in Fremont, California, Gigafactory Shanghai in China, Gigafactory Berlin in Germany, and Gigafactory Texas in Austin, Texas.
The 10 millionth vehicle was a Diamond Black Model Y.
Over the course of the past roughly 18 years, Tesla has evolved its lineup from a sporty sedan built on a Lotus body to a lineup of various body styles, performance metrics, and other characteristics that make each one unique.
This is an incredible achievement for a company that is young compared to what it goes up against. When Tesla entered the automotive market, Ford, GM, and Stellantis widely dominated the playing field. Since then, Tesla has caused such a disruption that these three massive brands had to scramble to create EV projects of their own.
Despite their best efforts, they have not been able to match the prowess or the effectiveness of Tesla. They are all reliant on Tesla’s charging infrastructure, their software is inferior, and their self-driving projects are elementary in comparison.
Tesla felt its fair share of growing pains over the years as well. As recent at 2019, there were complaints about build quality, paint quality, and overall luxuriousness. These things have all been improved upon through the company’s maturity, and these strides in quality have led to this 10 million vehicle production achievement, something that other small-and-scrappy EV makers will hope to accomplish one day.

Autonomous vehicle red tape gets slashed by Trump Administration

Elon Musk has a crazy prediction about AI in two years





