News
ULA rocket set to launch Solar Orbiter as NASA, ESA near golden era of sun science
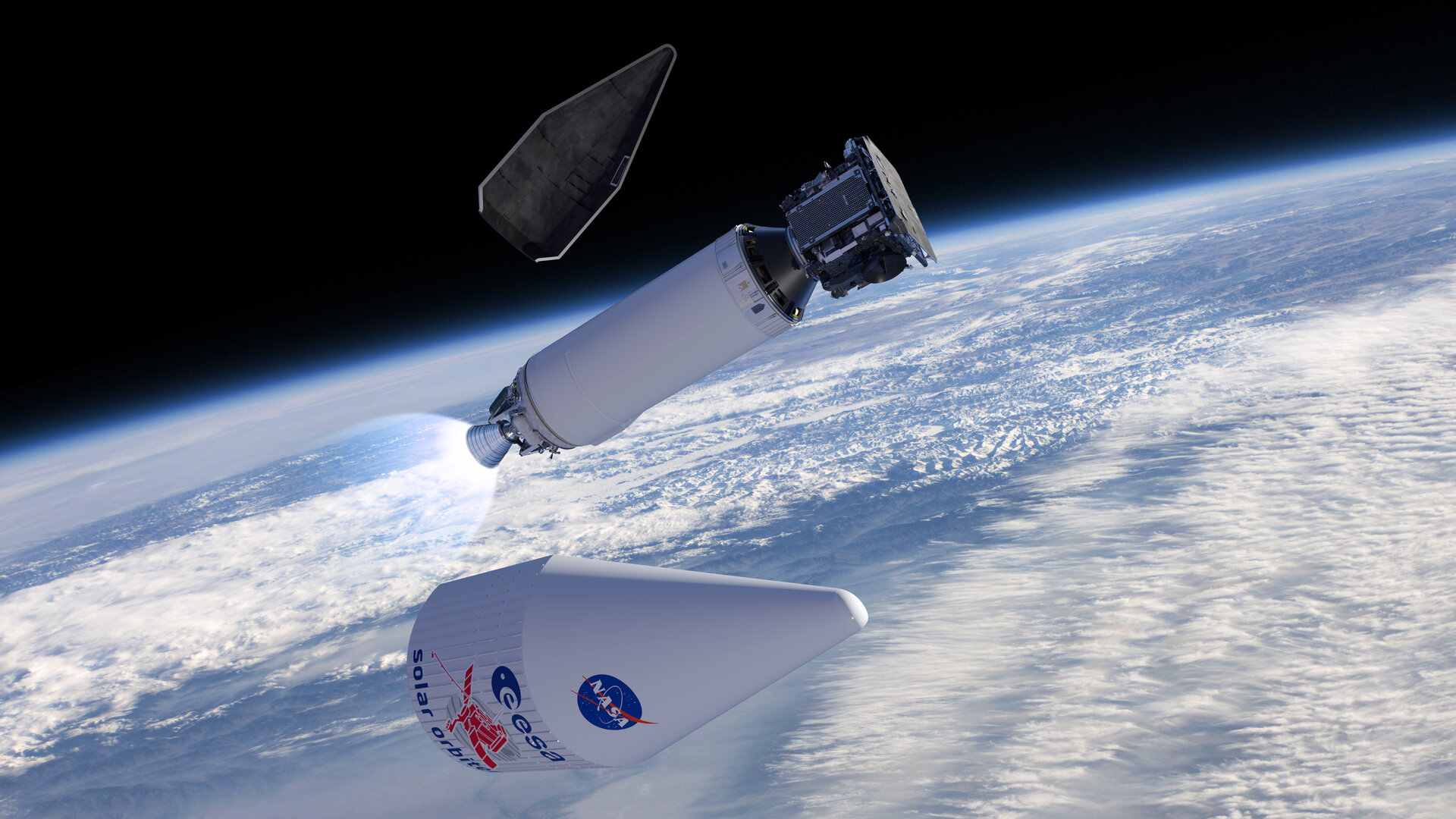
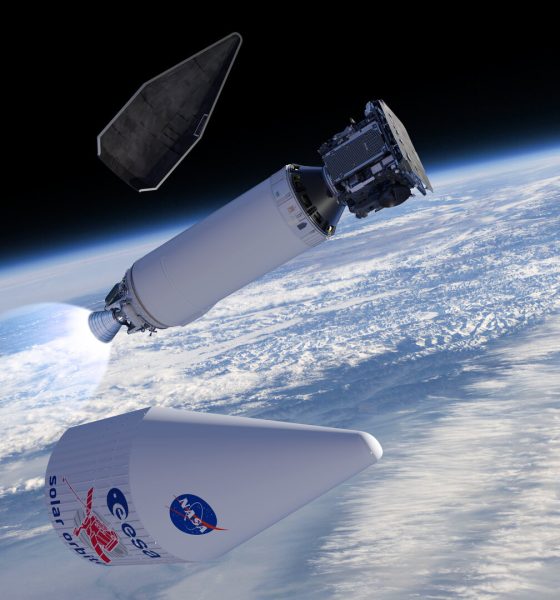
Just a year and a half after sending NASA’s Parker Solar Probe to study the Sun, United Launch Alliance (ULA) is ready to once again support a science mission on its way to the center of our solar system. The Solar Orbiter, a unique spacecraft jointly developed by NASA and the European Space Agency, will launch aboard a ULA Atlas V 411 booster, propelling it to the Sun to snap the first photos of its north and south poles.

The Solar Orbiter will work in conjunction with NASA’s Parker Solar Probe in unlocking the mysteries of our closest star. Parker Solar Probe occasionally dips into the Sun’s atmosphere – referred to as the corona – learning about the environment and the solar wind that propels energy and radiation into our solar system. The Solar Orbiter will – as the name suggests – orbit the Sun, but will remain further away than Parker (about 26 million miles away) allowing it to produce the first images of the Sun’s northern and southern poles. This advancement could potentially offer more insight into the Sun’s powerful magnetic field.
The ULA Atlas V 411 booster arrived in Florida back in November 2019. Since the completion of the previous Atlas V mission that supported the Boeing Starliner Orbital Flight Test in December 2019, ULA has been continuously prepping for the launch of the Solar Orbiter. In early January 2020, the booster was vertically hoisted into ULA’s Vertical Integration Facility. Following final booster preparations, including rolling it out to the launchpad for pre-launch testing twice, the safely encapsulated Solar Orbiter payload was carefully stacked on top during final integration on January 31st.

According to ULA, the Atlas V 411 configuration was selected to provide the necessary “Earth departure trajectory for making repeated close encounters with the sun.” The configuration used to launch the Solar Orbiter consists of a dual-nozzle main engine and one solid-fuel booster mounted to the side. This allows the rocket to utilize steering capability provided by the main engine while maintaining a center of gravity stabilized by the additional booster. ULA states that while this is a rather unique configuration, it is one that has been successfully utilized to support missions five times since 2006.

Ahead of the February 9th launch attempt, teams rolled the mighty Atlas V 411 out to the launchpad at Space Launch Complex-41 at Cape Canaveral Air Force Station to complete a full Wet Dress Rehearsal (WDR) – a full run-through of launch day operations including fueling the rocket and proceeding through terminal count. The first attempt at WDR resulted in a minor delay of launch due to a “wind-blown ECS cold air duct” that had to be replaced before testing could be completed, according to CEO of ULA, Tory Bruno. The second attempt of the WDR on January 24th was completed without a hitch.
On Friday morning February 7th, Bruno announced that all of pre-flight rehearsals and verifications were completed and the Solar Orbiter was ready to begin its journey to the Sun.
Currently, ULA and NASA are targeting a launch on Sunday, February 9th at 11:03 pm EST (0403 UTC) with a two-hour launch window. The launch weather is at 80% “GO” conditions with cumulus clouds as the primary concern for violation. Should the launch need to 24-hr recycle for a launch attempt on Monday, February 10th, weather conditions deteriorate slightly to 70% “GO.”
A live launch webcast will be provided on NASA TV beginning approximately 30 minutes prior to lift-off at 10:30 pm EST (0330 UTC).
Check out Teslarati’s newsletters for prompt updates, on-the-ground perspectives, and unique glimpses of SpaceX’s rocket launch and recovery processes.
 -
-
 -
-

Tesla is one of several automakers whose vehicles qualify for an awesome new first-time EV buyer incentive program in California.
The Golden State launched the MyFirstEV incentive program, which helps those buying an electric vehicle for the first time with a $3,500 incentive on new-inventory purchases of a Model 3 or Model Y.
First-time electric vehicle buyers in California can now get $3,500 off eligible Model 3 and Model Y new inventory vehicle purchases.
To be eligible, you must place your order on or after August 3, 2026 and take delivery while funds are still available. The incentive applies to… pic.twitter.com/yuXF00XA50
— Sawyer Merritt (@SawyerMerritt) August 4, 2026
The incentive requires an order on or after August 3, and delivery must be taken while the program is still being funded. California has set aside $135.5 million to help strengthen its SEV market and support automotive innovation.
Incentives are offered at the point of sale, and used EVs are also available for a partial incentive of $1,750. Half of the $3,500 and $1,750 incentive amounts are covered by California, with the other half being covered by participating OEMs.
Additionally, rules apply for MSRP and how the vehicle will qualify for the incentive. Any vehicle from a non-California headquartered OEM must have an MSRP of $50,000 or less. Used vehicles must be priced at $25,000 or less and must be at least two model years older than the year of purchase.
The cars must also be purchased from manufacturers as certified pre-owned vehicles. Private dealerships are not eligible.
In total, California expects to incentivize over 73,000 ZEVs.
Participating Manufacturers
Fourteen total automakers are participating in California’s MyFirstEV program:
- Chevrolet – Launching August 2026
- Ford – Launching August 2026
- Honda – Launching September 2026
- Hyundai – Launching August 2026
- Kia – Launching August 2026
- Lexus – Launching September 2026
- Lucid – Launching August 2026
- Mitsubishi – Launching November 2026
- Nissan – Coming Soon
- Rivian – Coming Soon
- Subaru – Launching September 2026
- Tesla – Launching August 2026
- Toyota – Launching September 2026
- Volvo – Coming Soon

Elon Musk’s space exploration company, SpaceX (NASDAQ: SPCX), is set to report its earnings for the second quarter today in what will be its first-ever earnings call since going public in July.
SpaceX is trading down roughly 25 percent from its IPO. These early stock signals are usually a bit tumultuous, and considering this is the first company actively launching rockets that is available on the stock exchange, investors might have a tendency to be a bit skittish.
However, there are going to be some details that investors will hear for the first time today on the earnings call. Here’s what to look for:
Wall Street Expectations
Revenue is expected to fall somewhere around $6.8 billion, and will be heavily driven by Starlink, which is SpaceX’s widely popular satellite internet platform that has been adopted by numerous airlines, cruise ships, and other maritime operations. It is also available for consumers at home or in their cars.
Earnings Per Share (EPS) expectations fall at a net loss of $0.23 per share. Wall Street sees this as a total net loss of roughly $1.9 billion.
EBITDA is expected to come in between $2 billion and $2.1 billion.
What Investors Want to Know
Tesla uses the Say platform to help work with both retail and institutional investors to answer relevant and quality questions that address concerns or questions that they might have.
However, SpaceX is doing things differently, as the company launched its own Investor Relations website where these questions are being fielded. Just like the Tesla questions, they seem to be less focused on the operational tasks and overall progress of the company, and more novelty.
Here are the top five:
- Has the team thought about what possibilities there are with your mascot Asteroid? Whether it’s starting additional foundations for kids in its name, helping kids learn about space, etc. Kids are our future, and Asteroid would be a fun and easy way to help.
- Baby Asteroid is already making a difference through charity around the world. Could SpaceX take it even further with programs that inspire kids to explore space?
- SpaceX has some legendary vehicle names. Would you ever allow the public to name a Starship, even knowing there is a 99% chance it becomes Shipy McShipface?
- When can we expect to see more footage of the Human Landing System?
- Will Asteroid (your mascot) go to Mars?
SpaceX will report its earnings today, August 4, at 4:30 P.M. EDT.

Lemonade has expanded its innovative Autonomous Car insurance program to Tennessee, giving Tesla owners in the state a substantial discount on Full Self-Driving (FSD) miles. Announced on August 3, the product offers 50 percent off every mile driven with FSD activated, positioning the digital insurer as a leader in pricing insurance around autonomous technology.
The program, marketed as Lemonade Autonomous Car insurance, uses a direct connection via Tesla’s Fleet API (with customer permission) to automatically distinguish FSD-engaged miles from manual driving. Policyholders pay a low base rate when the vehicle is stationary and a few cents per mile when moving, with the 50 percent reduction applied specifically to FSD miles.
If you’re driving a Tesla in Tennessee, FSD miles now cost 50% less to insure with Lemonade. Autonomous Car is now live in TN.https://t.co/4CDTuhyORi pic.twitter.com/QZk4LBIs6f
— Lemonade (@Lemonade_Inc) August 3, 2026
Coverage includes standard protections such as liability, collision, comprehensive, roadside assistance, and Tesla-specific benefits like access to certified repair shops and emergency crash services. Eligible vehicles require Hardware 4, as well as recent firmware.
Lemonade first unveiled the product on January 21 of this year, describing it as a first-of-its-kind offering designed for self-driving cars, starting with Tesla FSD. It began rolling out in Arizona on January 26, followed by Oregon about a month later. Subsequent expansions brought it to Indiana in early June 2026 and Colorado later that month.
Tennessee marks the fifth state.
Tesla Full Self-Driving gets outrageous insurance offer with insanely cheap rates
The discount rests on Lemonade’s strong belief in the safety of Tesla’s FSD system. The company cites Tesla’s data showing that FSD-driven miles are twice as safe as those driven manually, or associated with roughly a 50 percent crash reduction.
Lemonade Co-founder and President Shai Wininger has emphasized this distinction: “Traditional insurers treat a Tesla like any other car, and AI like any other driver. But a car that sees 360 degrees, never gets drowsy, and reacts in milliseconds can’t be compared to a human.”
He added that “Teslas driven with FSD are involved in far fewer accidents” and committed that as FSD software improves and becomes safer, Lemonade’s prices will drop further.
Tesla Full Self-Driving gets an offer to be insured for ‘almost free’
This approach leverages Lemonade’s existing pay-per-mile technology and AI-driven risk models, which analyze nuanced vehicle data including software version and sensor performance. The company expects the model to reward higher FSD usage with greater savings while supporting mixed households that include both Tesla and non-Tesla vehicles under one policy. Bundling with home, renters, or pet insurance can yield additional discounts.
As autonomous driving technology advances, Lemonade’s state-by-state expansion of usage-based pricing that directly reflects real-world safety data represents a notable shift in how insurers evaluate risk.
Tesla owners in the five available states – Arizona, Oregon, Indiana, Colorado, and now Tennessee – can obtain quotes quickly through the Lemonade app or website, potentially lowering the overall cost of ownership for vehicles equipped with advanced driver-assistance systems. Further states are expected as regulatory approvals progress.

Tesla qualifies for awesome new first-time EV buyer incentive in California

SpaceX to report first-ever earnings today: here’s what to expect





