Firmware
Tesla announces details behind Version 8.0 with updated Autopilot system
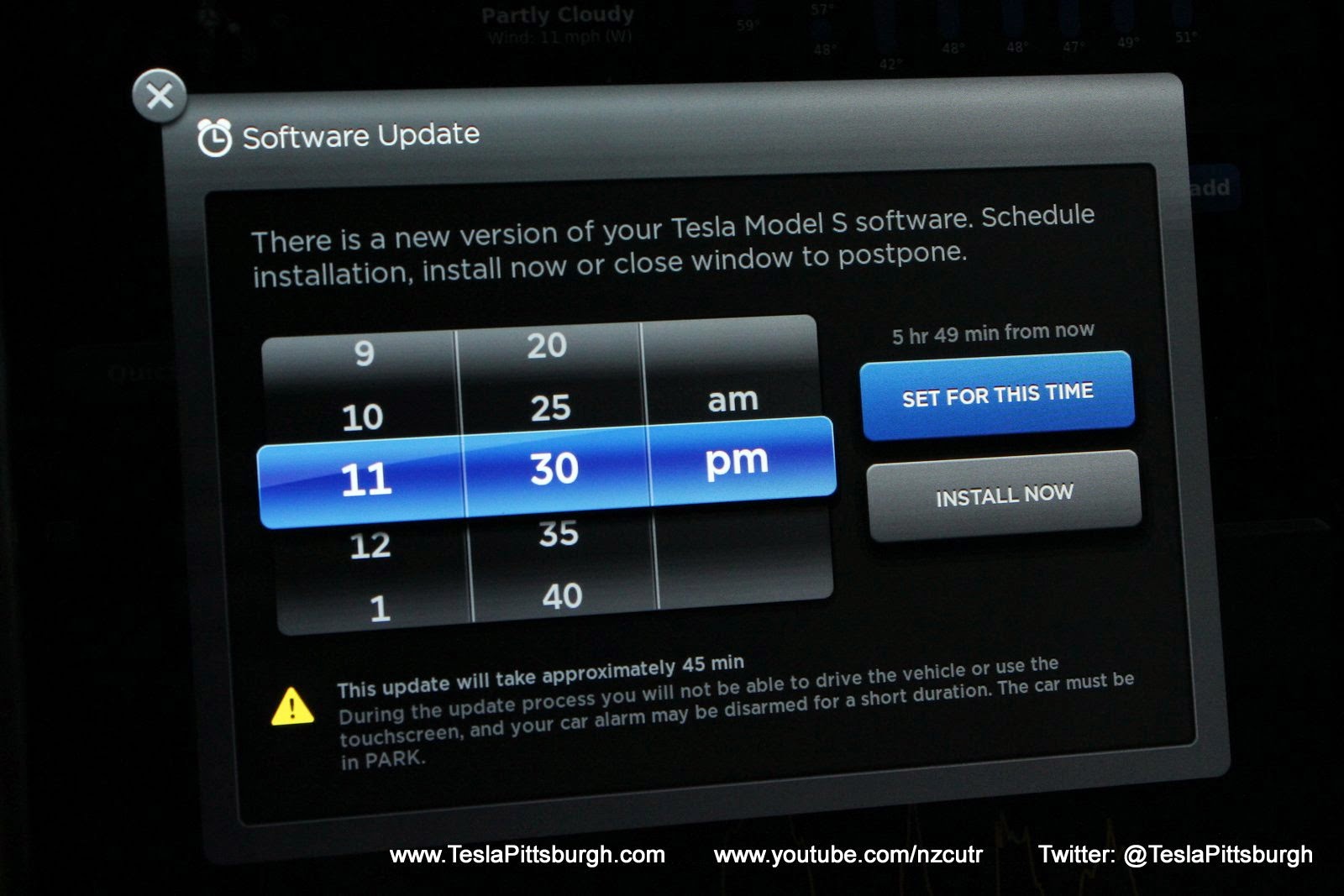
Tesla held a press conference on Sunday to announce that the company will be releasing the much-anticipated Version 8.0 with improved Autopilot system through an over-the-air software update. Existing Model S, with Autopilot hardware, and Model X owners will receive the update in approximately two weeks.
Tesla CEO Elon Musk told press that Autopilot will cut accidents by roughly 50% and the latest update will provide safety improvements by a factor of three over the existing system. Tesla was able to develop these improvements all in-house in the absence of MobileEye using improved ‘smart radar’ technology and data collected through its fleet learning program. Contrary to speculation that Tesla might be considering the use of LIDAR technology, Musk reassured press that its radar hardware will become the primary tech for Autopilot as opposed to serve as a supplemental set of sensors to the vehicle’s onboard cameras.
The Autosteer feature has been drastically improved and will steer a vehicle out of harms way in the event the system is highly confident that a collision is imminent. Musk noted to press that the latest round of Autopilot improvements would have prevented the recent death where Joshua Brown’s Model S drove into the side of a tractor trailer.
The improved Autopilot system will also be able to predict off-ramp exits and exit the vehicle through its Autosteer feature.
We’ve provided the full details of the upcoming version 8 published on Tesla’s blog.
Tesla Version 8.0 with Improved Autopilot
Upgrading Autopilot: Seeing the World in Radar
While there are dozens of small refinements with Version 8 of our software, described in addendum below, the most significant upgrade to Autopilot will be the use of more advanced signal processing to create a picture of the world using the onboard radar. The radar was added to all Tesla vehicles in October 2014 as part of the Autopilot hardware suite, but was only meant to be a supplementary sensor to the primary camera and image processing system.
After careful consideration, we now believe it can be used as a primary control sensor without requiring the camera to confirm visual image recognition. This is a non-trivial and counter-intuitive problem, because of how strange the world looks in radar. Photons of that wavelength travel easily through fog, dust, rain and snow, but anything metallic looks like a mirror. The radar can see people, but they appear partially translucent. Something made of wood or painted plastic, though opaque to a person, is almost as transparent as glass to radar.
 -
-
On the other hand, any metal surface with a dish shape is not only reflective, but also amplifies the reflected signal to many times its actual size. A discarded soda can on the road, with its concave bottom facing towards you can appear to be a large and dangerous obstacle, but you would definitely not want to slam on the brakes to avoid it.
Therefore, the big problem in using radar to stop the car is avoiding false alarms. Slamming on the brakes is critical if you are about to hit something large and solid, but not if you are merely about to run over a soda can. Having lots of unnecessary braking events would at best be very annoying and at worst cause injury.
The first part of solving that problem is having a more detailed point cloud. Software 8.0 unlocks access to six times as many radar objects with the same hardware with a lot more information per object.
The second part consists of assembling those radar snapshots, which take place every tenth of a second, into a 3D “picture” of the world. It is hard to tell from a single frame whether an object is moving or stationary or to distinguish spurious reflections. By comparing several contiguous frames against vehicle velocity and expected path, the car can tell if something is real and assess the probability of collision.
The third part is a lot more difficult. When the car is approaching an overhead highway road sign positioned on a rise in the road or a bridge where the road dips underneath, this often looks like a collision course. The navigation data and height accuracy of the GPS are not enough to know whether the car will pass under the object or not. By the time the car is close and the road pitch changes, it is too late to brake.
This is where fleet learning comes in handy. Initially, the vehicle fleet will take no action except to note the position of road signs, bridges and other stationary objects, mapping the world according to radar. The car computer will then silently compare when it would have braked to the driver action and upload that to the Tesla database. If several cars drive safely past a given radar object, whether Autopilot is turned on or off, then that object is added to the geocoded whitelist.
When the data shows that false braking events would be rare, the car will begin mild braking using radar, even if the camera doesn’t notice the object ahead. As the system confidence level rises, the braking force will gradually increase to full strength when it is approximately 99.99% certain of a collision. This may not always prevent a collision entirely, but the impact speed will be dramatically reduced to the point where there are unlikely to be serious injuries to the vehicle occupants.
-
The net effect of this, combined with the fact that radar sees through most visual obscuration, is that the car should almost always hit the brakes correctly even if a UFO were to land on the freeway in zero visibility conditions.
Taking this one step further, a Tesla will also be able to bounce the radar signal under a vehicle in front – using the radar pulse signature and photon time of flight to distinguish the signal – and still brake even when trailing a car that is opaque to both vision and radar. The car in front might hit the UFO in dense fog, but the Tesla will not.
Additional Autopilot Release Notes
- TACC braking max ramp rate increased and latency reduced by a factor of five
- Now controls for two cars ahead using radar echo, improving cut-out response and reaction time to otherwise-invisible heavy braking events
- Will take highway exit if indicator on (8.0) or if nav system active (8.1). Available in the United States initially
- Car offsets in lane when overtaking a slower vehicle driving close to its lane edge
- Interface alerts are much more prominent, including flashing white border on instrument panel
- Improved cut-in detection using blinker on vehicle ahead
- Reduced likelihood of overtaking in right lane in Europe
- Improved auto lane change availability
- Car will not allow reengagement of Autosteer until parked if user ignores repeated warnings
- Automatic braking will now amplify user braking in emergencies
- In manual mode, alerts driver if about to leave the road and no torque on steering wheel has been detected since Autosteer was deactivated
- With further data gathering, car will activate Autosteer to avoid collision when probability ~100%
- Curve speed adaptation now uses fleet-learned roadway curvature
- Approximately 200 small enhancements that aren’t worth a bullet point

Firmware
Tesla unlocks in-car web conferencing to extend Google Meet, Teams and beyond
Tesla’s Summer Update lets owners join Google Meet, Teams, and Discord calls via cabin camera.

Tesla’s 2026 Summer Update, which just began rolling out to customer vehicles, now links the built-in web browser with the in-cabin camera feed and microphone input, thereby letting owners join video calls on nearly any browser-based service instead of just Zoom.
The change appears in Tesla’s own release notes for software version 2026.26 under “Web Browser,” which states that the vehicle can now use its interior camera and cabin microphone when a website requests access, with permission granted the same way a desktop browser handles it. As NotATeslaApp notes, this feature opens the door to Google Meet, Microsoft Teams, Discord, and other webcam-enabled sites to activate the in-car cabin-facing camera. The feed automatically crops and zooms to center the driver in frame.
Tesla has offered in-car video calling before, but only through a dedicated Zoom app that launched at the end of 2022, a stripped-down browser preloaded with Zoom’s own web client and gated behind Premium Connectivity. Opening the full browser to any camera-requesting site removes that walled garden. Elon Musk first called video conferencing “definitely a future feature” back in 2020, when the pandemic pushed remote meetings into daily life, so this update effectively finishes something Tesla has been promising for six years.
Tesla Summer Update begins rolling out: a look at the new features
The feature keeps the same restrictions that applied to Zoom on Tesla vehicles. It only works while the car is parked; shifting into Drive disables the camera feed, according to the release notes. It is also limited to vehicles running Tesla’s AMD Ryzen infotainment hardware, meaning older Intel-based Model S and Model X units, along with early Model 3 and Model Y builds, don’t get it.
Turning the browser into a general entry point for the in-cabin camera, rather than routing everything through one local app, widens the number of third-party sites that can ask for access, even though Tesla’s permission prompt.
With the Summer update only days into its rollout, be sure to stay with us on TikTok and X to see the latest video demonstrations.
-
Elon Musk
Tesla confirmed HW3 can’t do Unsupervised FSD but there’s more to the story
Tesla confirmed HW3 vehicles cannot run unsupervised FSD, replacing its free upgrade promise with a discounted trade-in.

Tesla has officially confirmed that early vehicles with its Autopilot Hardware 3 (HW3) will not be capable of unsupervised Full Self-Driving, while extending a path forward for legacy owners through a discounted trade-in program. The announcement came by way of Elon Musk in today’s Tesla Q1 2026 earnings call.
🚨 Our LIVE updates on the Tesla Earnings Call will take place here in a thread 🧵
Follow along below: pic.twitter.com/hzJeBitzJU
— TESLARATI (@Teslarati) April 22, 2026
The history here matters. HW3 launched in April 2019, and Tesla sold Full Self-Driving packages to owners on the understanding that the hardware was sufficient for full autonomy. Some owners paid between $8,000 and $15,000 for FSD during that period. For years, as FSD’s AI models grew more demanding, HW3 vehicles fell progressively further behind, eventually landing on FSD v12.6 in January 2025 while AI4 vehicles moved to v13 and then v14. When Musk acknowledged in January 2025 that HW3 simply could not reach unsupervised operation, and alluded to a difficult hardware retrofit.
The near-term offering is more concrete. Tesla’s head of Autopilot Ashok Elluswamy confirmed on today’s call that a V14-lite will be coming to HW3 vehicles in late June, bringing all the V14 features currently running on AI4 hardware. That is a meaningful software update for owners who have been frozen at v12.6 for over a year, and it represents genuine effort to keep older hardware relevant. Unsupervised FSD for vehicles is now targeted for Q4 2026 at the earliest, with Musk describing it as a gradual, geography-limited rollout.
For HW3 owners, the over-the-air V14-lite update is welcomed, and the discounted trade-in path at least acknowledges an old obligation. What happens next with the trade-in pricing will define how this chapter ultimately gets written. If Tesla prices the hardware path fairly, acknowledges what early adopters are owed, and delivers V14-lite on the June timeline it committed to today, it has a real opportunity to convert one of the longest-running sore subjects among early adopters into a loyalty story.
-
Tesla announced its Spring 2026 software update, and it’s the most feature-dense seasonal release the company has put out. The update covers twelve named changes spanning FSD, voice AI, safety lighting, dashcam storage, and pet display customization, among other things.
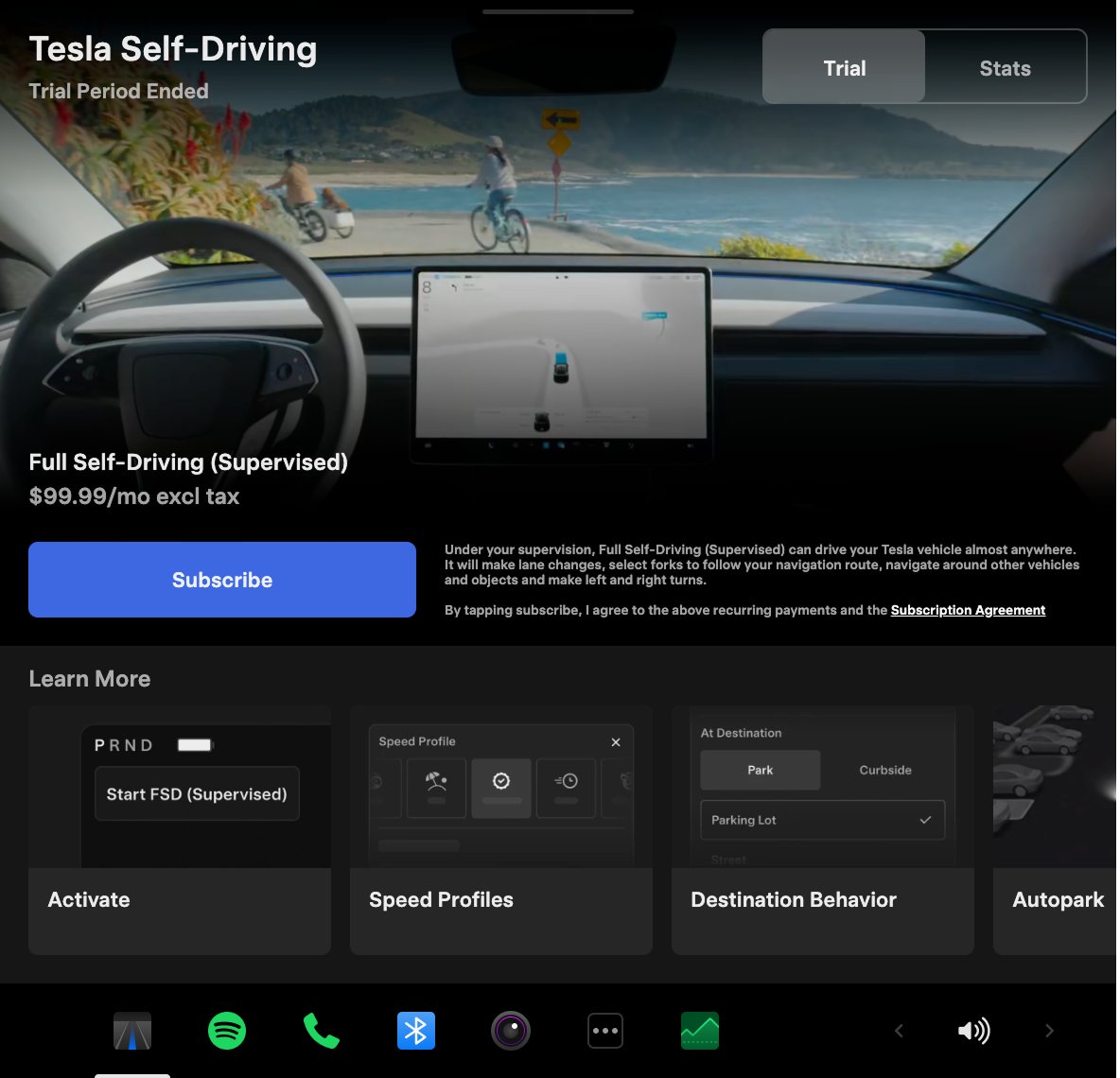
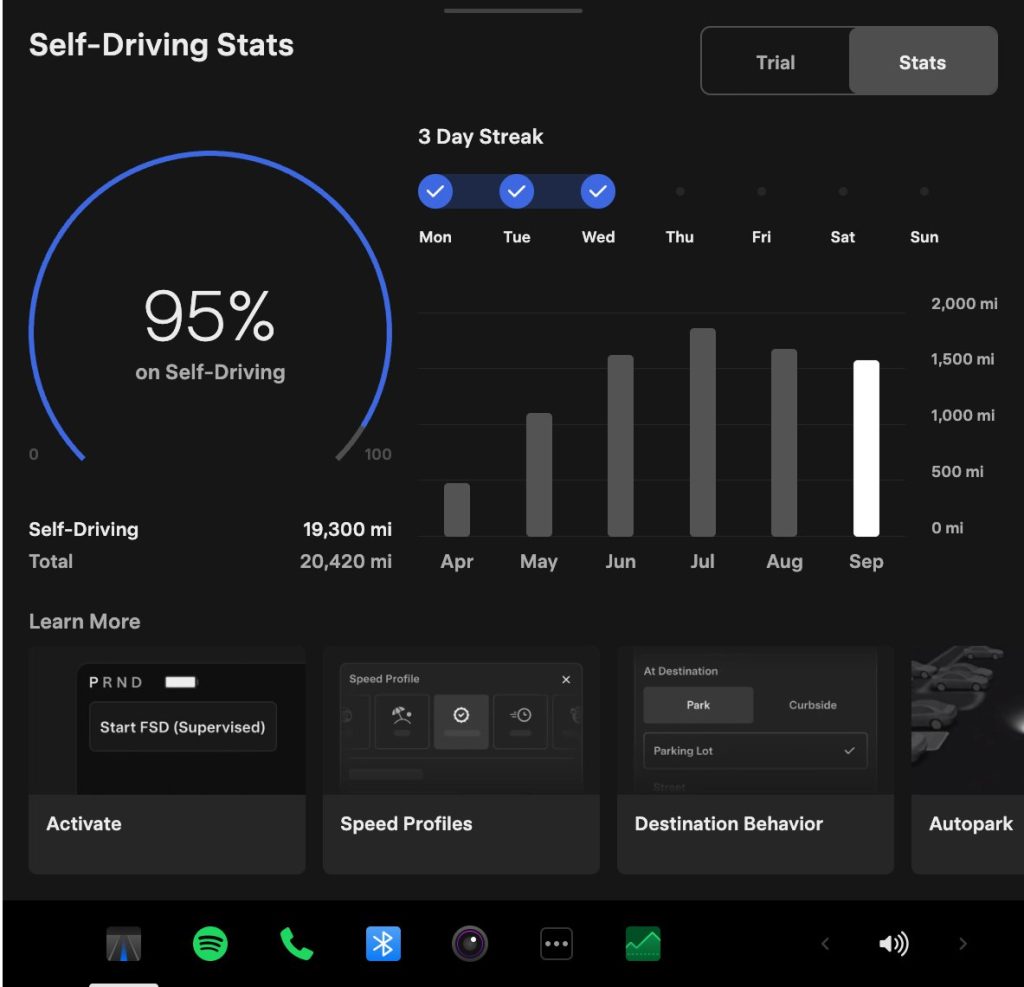
The centerpiece for owners with AI4 hardware is a redesigned Self-Driving app. The new interface lets owners subscribe to Full Self-Driving with a single tap and view ongoing FSD usage stats directly in the vehicle.
Grok gets its biggest in-car upgrade yet. The update adds a “Hey Grok” hands-free wake word along with location-based reminders, so a driver can now say “remind me to pick up groceries when I get home” without touching the screen. Grok first arrived in vehicles in July 2025, but each update has pushed it closer to genuine daily utility. Musk framed the broader vision clearly at Davos in January, saying Tesla is “really moving into a future that is based on autonomy.”
On safety, the update introduces enhanced blind spot warning lights that integrate directly with the cabin’s ambient lighting, building on the blind spot door warning that arrived in update 2026.8.

Dog Mode has been renamed Pet Mode and now lets owners choose a dog, cat, or hedgehog icon and add their pet’s name to the display.
Dashcam retention now extends up to 24 hours, up from the previous one-hour rolling loop, with a permanent save option for any clip. Weather maps now show rain and snow with better color differentiation and include the past hour of precipitation data along the route.
Tesla has now established a clear rhythm of two major OTA pushes per year. As with last year’s Spring update, that cycle started taking shape in 2025 with adaptive headlights and trunk customization. The 2025 Holiday Update then added Grok to the vehicle for the first time. This Spring follows that structure: the Holiday update introduces new architecture, and the Spring update broadens it across the fleet.
-
Two notable features still did not make it. IFTTT automations, which launched in China earlier this year, were held back from this North American release for unknown reasons, and Apple CarPlay remains absent, reportedly still delayed by iOS 26 and Apple Maps compatibility issues.
Below is the full list of feature updates released by Tesla.
— Tesla (@Tesla) April 13, 2026

Tesla Full Self-Driving v14.3.7 early review: FSD saved me from an accident

SpaceX’s biggest test yet arrives this week and it’s not a rocket launch





