News
SpaceX’s mystery “Optimus Prime” drone ship robot spotted testing ahead of BulgariaSat-1 mission
Just a little over three months ago, in mid March, fans of SpaceX caught their first full glimpses of a mysterious robot aboard the drone ship Of Course I Still Love You (OCISLY) while it was docked in Port Canaveral, Florida.
Rapidly deemed “Roomba” and later heard to be internally nicknamed “Optimus Prime”, it was approximately 50 feet (15 meters) across at its widest point and appeared to be extremely heavy due to the way it was handled on the side of the docks, as well as the presence of tracks rather than wheels. The SpaceX community quickly came to the conclusion that it was some sort of robotic tool for remotely securing Falcon 9 first stages following landings aboard SpaceX’s drone ship fleet, as first stages had a tendency to rather precariously slide about drone ships in high seas.
-

- Optimus Prime roving around OCISLY on June 13th. (Brady Kenniston/NASAspaceflight.com)

-

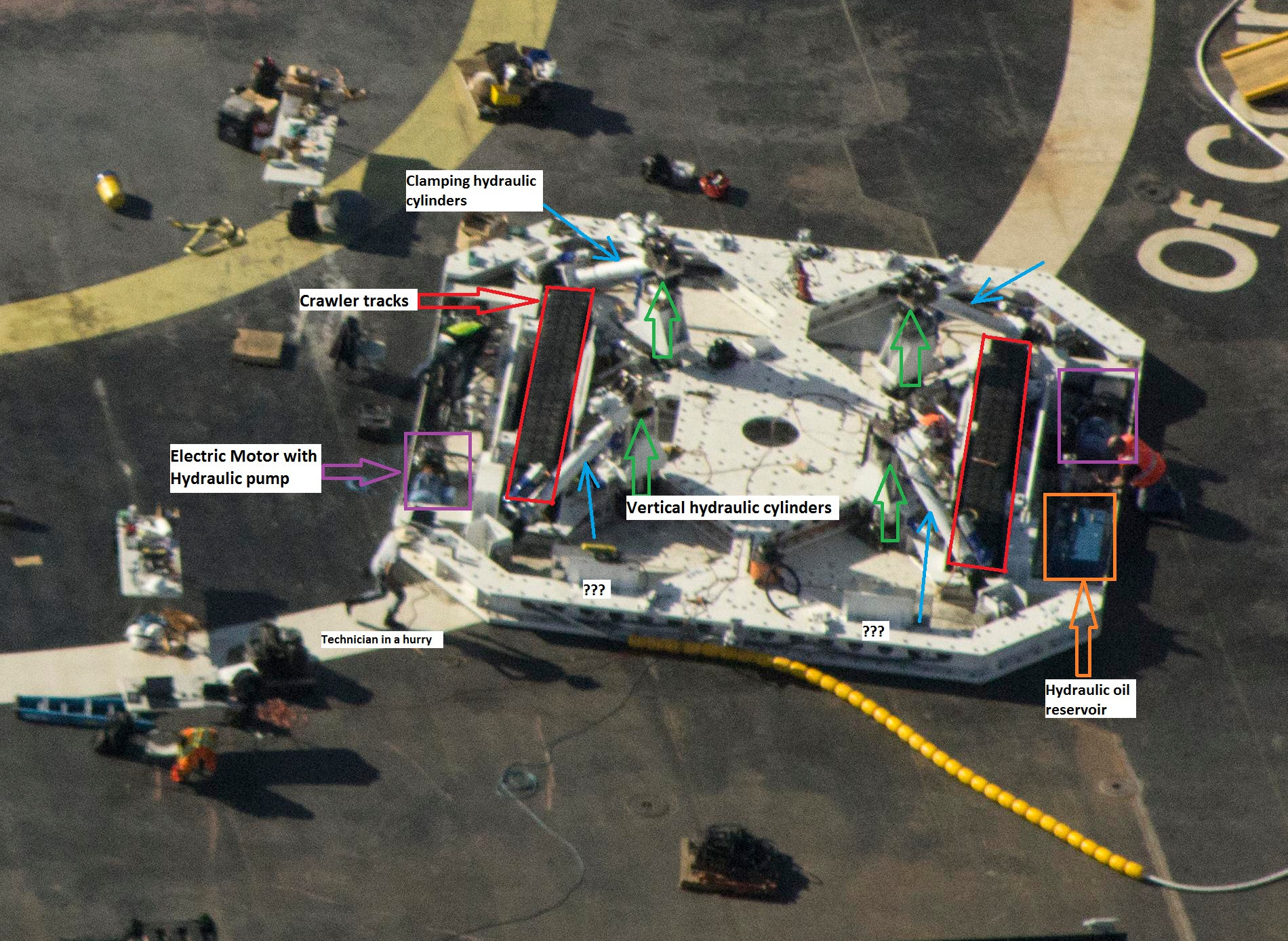
- Optimus Prime captured by helicopter while conducting tests in March earlier this year. (Source: Reddit /u/riddlerthc)
This speculation was proven correct during a press conference following the successful launch of SES-10 and SpaceX’s first successful reuse; the Roomba/Optimus Prime was indeed a measure to more rapidly and safely secure first stages after landing aboard drone ships. The primary reason for this robot existing is to better ensure the safety of those working aboard active drone ships. Removing the requirement for people to be aboard a barge with an unsecured 50,000 kilogram rocket that has a tendency to explode violently after falling over.

The hallowed remains of the Falcon 9 that successfully launched Jason-3 but was somewhat less successfully recovered. (NASAspaceflight)
It is currently unclear whether the robot is intended to be a precaution only used in high seas or a tool to be used for every autonomous spaceport drone ship recovery. But the fact that it was seen conducting tests aboard OCISLY just a day before SpaceX’s static fire test for the upcoming launch of BulgariaSat-1 indicates that the upcoming launch may be the robot’s first truly operational test. It is also possible that SpaceX may simply choose to recover the stage and bring it back to port before conducting tests with the robot and an actual Falcon 9 S1 aboard OCISLY, with this latter option forcing less reliance upon a currently unproven (but nevertheless rather simple) technology.
Aside from the morally prescient goal of removing safety hazards for the Falcon 9 recovery crew, the ability to remotely secure Falcon 9 first stages will also avoid the time consuming practice of welding the landing legs and hydraulic jacks to the deck of the barge. This will likely remove hours of cautious procedures designed to protect those working aboard the barge once a stage has landed. As previously discussed on Teslarati, the possibility of weekly launches occurring from Cape Canaveral later this winter or sometime in 2018 gives SpaceX significant motivation to increase the availability of OCISLY, its only East coast-based drone ship.

A Falcon 9 S1 secured the old-fashioned way with leg shoes welded to the deck and hydraulic lifts to keep weight off the legs. (NASAspaceflight)
While the several days typically required to sail several hundred miles to the barges’ recovery destinations are not about to change, the ability to remotely secure recovered stages will both drastically improve the safety of the recovery crew and allow OCISLY to spend less time on station in the Atlantic, and thus more time back in port to offload its Falcon 9 payload and prepare for the next recovery.
For SpaceX’s goal of rapid reusability, every day and even every hour that can be removed from the process of launching, recovering, and relaunching is time that could theoretically be spent launching the payloads of paying customers, or launching SpaceX’s own payloads of revenue-producing broadband satellites and data-producing Red Dragons. As the saying goes, time is money.
 -
-


Tesla flexed the new features of the Model Y L with a dedicated media event at the company’s Diner on Santa Monica Boulevard in Los Angeles.
The Model Y L is the extended-wheelbase version of the all-electric crossover, which has been voted the best-selling car in the world on three occasions. The vehicle is already rolling off production lines at Gigafactory Texas, and first deliveries are slated to take place later this year.
Tesla brings Model Y L ‘Launch Series’ to the U.S. at $61,990
Teslarati was invited to the event, but due to some scheduling conflicts, we could not make it to Los Angeles. Instead, we will have our hands on a media unit sometime in August, so we’ll be able to spend some more extended time with the Model Y L.
However, plenty of those who made it to LA shared some cool features that set the Model Y L apart from the Model Y.
Multi-Row Climate Control
Tesla fitted the Model Y L with full climate control on all three rows on the front screen. It can be adjusted by selecting which row you’d like to modify on the right-hand side of the touch screen:
The Model Y L has a little row of icons on the right side of the climate screen so the front passenger can more quickly jump to whatever row they want to control. pic.twitter.com/uJS44mgCvk
— Sawyer Merritt (@SawyerMerritt) July 30, 2026
-
Better Rear Window Visibility
One of the strangest things about the Model Y, especially the Juniper iteration, is the rear window has extremely limited visibility when looking into the rearview mirror.
Tesla has improved upon this with the Model Y L:
This is a drastic difference. https://t.co/wTdhitD5aA pic.twitter.com/z6hFs0Jkss
— TESLARATI (@Teslarati) July 30, 2026
PowerShare will be included
Model Y L will come with PowerShare in North America, with an 11.5kW output to your home. Tesla said it would require Powerwall 3 for operation.
Wireless Charging Pad
There has been some speculation that Tesla would upgrade the wireless charging pads in the United States, but this is not the case.
-
Tesla owner fixes common feature complaint with crafty DIY retrofit
Tesla confirmed that it does not come with the cooled pads as the Y L in China does. This is because North America has not adopted Qi charging yet.
Thermal Management Improvements
These improvements in the Model Y L were seen with thermal management:
- Up to 15% faster cabin cooling
- +23% thermal efficiency gained in hot weather, 7 miles of real-world range gained
- 8x more solar energy reflection off of glass roof
- 30% reduction in solar energy entering the cabin
Some of the thermal management improvements in the new Model Y L Premium:
• Up to 15% faster cabin cooling
• Up to 15 min faster cabin cooling in sunny conditions
• +23% thermal efficiency gained in hot weather +7 miles of real-world range gained
• +10 miles recovered after… pic.twitter.com/jZirFWFdtO— Sawyer Merritt (@SawyerMerritt) July 31, 2026
Demand
Tesla said the Model Y L is almost sold out in the U.S. It comes with
-
- 1 year of FSD Supervised
- 1 year of Supercharging
- 1 year of Premium Connectivity
- Free exterior paint color, interior, and wheel option at no additional cost

Tesla CEO Elon Musk took to his social media platform X on Thursday night to deny a ridiculous rumor regarding the sale of the company’s Chinese vehicle production plant, Gigafactory Shanghai.
On Thursday, the Wall Street Journal, citing sources familiar with the matter, claimed in a scathing new report that Tesla was exploring a potential sale of the entire China business in an effort to help bolster a potential merger between SpaceX and Tesla.
Musk immediately denied the rumor not once but twice, initially calling it “fake news,” and then calling it “absurdly fake news” in a separate post just a few moments later:
This is fake news
— Elon Musk (@elonmusk) July 31, 2026
The original poster of the Wall Street Journal article that Musk saw deleted the initial post sharing the headline and the rumored sale of Tesla’s China business.
This has never even come up in a discussion ever.
Absurdly fake news.
-People should assume news is fake until proven otherwise.
— Elon Musk (@elonmusk) July 31, 2026
The report seemed absolutely and unequivocally false to begin with; Tesla’s business in China is among the most important pieces of the company’s business. Not only does the factory supply vehicles for the domestic market, but also for various other markets in Asia and Europe.
China is also one of the largest automotive markets in the world, and Tesla has performed well there despite the robust competition.
The speculation regarding a Tesla and SpaceX merger has started to gain steam this year as the space exploration company went public just a month ago. There has been speculation that Musk will bridge all of his companies under one “umbrella company,” and analysts believe this could happen before the end of the decade.
The Tesla and SpaceX merger everyone is talking about is quietly building
-
This is the latest iteration of Musk’s very evident war on mainstream media. Reports regarding any of Musk’s companies are quick to get the dreaded “false” or “fake news” response from the CEO when they are unfounded.
Elon Musk
Tesla AI boss reveals how big Optimus is going to get
Tesla’s Optimus chief corrected himself on X, confirming a staggering 10 million robot production target.
![Tesla Optimus Gen 3 [Credit: Tesla]](https://www.teslarati.com/wp-content/uploads/2026/03/tesla-optimus-gen3-diner.jpg)
Tesla’s Optimus program has a new number attached to it, after Ashok Elluswamy, the executive who has run the humanoid robot program since June 2025, posted a three word correction on X Thursday, “Correction, 10 million robots.”
The line clarifies the long term annual capacity Tesla is building toward its planned second Optimus production line at Gigafactory Texas, a figure Musk has cited repeatedly since last year’s shareholder meeting.
The scale is worth noting, because ten million robots a year would mean Tesla building more units annually than most countries sell in new cars. Tesla has framed this as a second line, not the first. The buildout is happening in two phases: a roughly one million unit per year line inside Tesla’s Fremont factory, installed on the floor space vacated when Model S and Model X production ended earlier this year, and a much larger dedicated facility under construction at Giga Texas that broke ground on its first steel structure in May. That Texas facility is the one Elluswamy’s correction refers to, and is expected to reach volume production sometime in 2027.
Correction, 10 million robots https://t.co/0z4nyQNTzp
— Ashok Elluswamy (@aelluswamy) July 30, 2026
Tesla Optimus project fires up as Musk sees production line progress
Elluswamy took over Optimus from Milan Kovac last summer and has spent the months since talking up the program’s trajectory. Elon Musk has also floated the ten million figure at Tesla’s 2025 shareholder meeting.
-
Ending Model S and Model X production to make room for the first Optimus line was one of the more consequential manufacturing decisions in the company’s recent history, retiring two flagship vehicles in favor of a robot that has yet to enter mass production. Musk has previously estimated per unit production costs at $20,000 to $25,000 once Tesla reaches a million units a year, though he hasn’t said what that cost looks like at ten times the volume.

Tesla Model Y L’s new features flexed at unveiling event at Diner

Tesla CEO Elon Musk denies ridiculous Gigafactory Shanghai rumor
![Tesla Optimus Gen 3 [Credit: Tesla]](https://www.teslarati.com/wp-content/uploads/2026/03/tesla-optimus-gen3-diner-80x80.jpg)




