News
SpaceX CEO Elon Musk details orbital refueling plans for Starship Moon lander
After a much-anticipated GAO denial of Blue Origin and Dynetics protests over NASA’s decision to solely award SpaceX a contract to turn Starship into a crewed Moon lander, an in-depth (but heavily redacted) document explaining that decision was released on August 10th.
Aside from ruthlessly tearing both companies’ protests limb from limb, the US Government Accountability Office’s decision also offered a surprising amount of insight into SpaceX’s HLS Starship proposal. One of those details in particular seemed to strike an irrational nerve in the online spaceflight community. Specifically, in its decision, GAO happened to reveal that SpaceX had proposed a mission profile that would require as many as 16 launches to fully fuel a Starship Lander and stage the spacecraft in an unusual lunar orbit.
After around 24 hours of chaos, confusion, and misplaced panic, SpaceX CEO Elon Musk finally weighed in on the GAO document’s moderately surprising indication that each Starship Moon landing would require sixteen SpaceX launches.
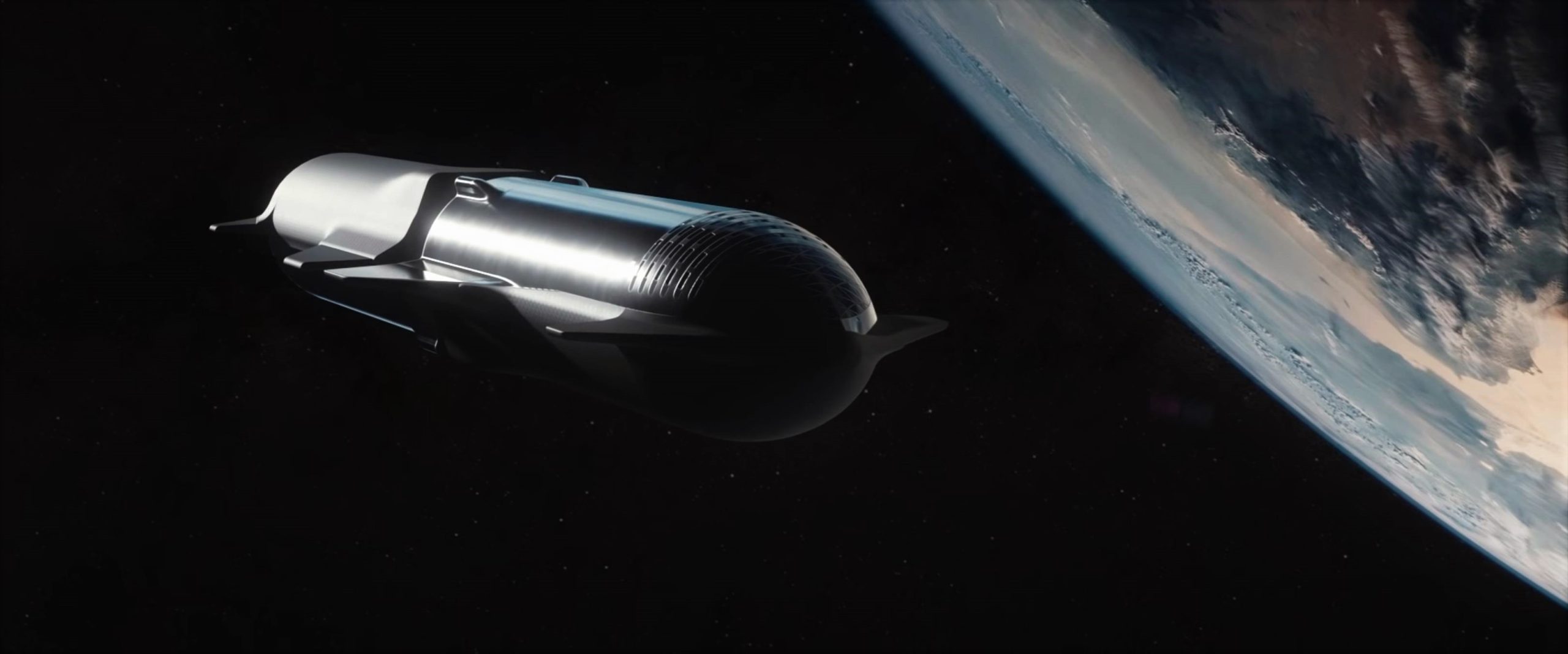
Confirming many expectations, SpaceX’s solution to sending an entire single-stage Starship to the Moon, landing it on the lunar surface, and returning it to a lunar orbit (and maybe even Earth) goes as follows.
First, SpaceX will launch a custom variant of Starship that was redacted in the GAO decision document but confirmed by NASA to be a propellant storage (or depot) ship last year. Second, after the depot Starship is in a stable orbit, SpaceX’s NASA HLS proposal reportedly states that the company would begin a series of 14 tanker launches spread over almost six months – each of which would dock with the depot and gradually fill its tanks.
Third, once the depot ship is topped off, the actual Starship Moon lander would launch, dock with the depot, and be fully fueled. Finally, the fueled lander would fire up its Raptor engines and head to the Moon, where it would enter a near-rectilinear halo orbit (NRHO) – a weird high-altitude, elliptical orbit only necessary because NASA’s Orion spacecraft and SLS rocket are too underpowered to reach a more normal, functional orbit around the Moon.
After reaching NRHO, Starship would dock with Orion (or vice versa), receive its Artemis astronauts, land on the Moon for several days, and launch back to NRHO to return those astronauts to Orion. After its main mission is complete, it remains to be seen if Starship will have enough propellant left over to return to some kind of Earth orbit, where it could potentially be refueled and reused on future missions to the lunar surface.
 -
-
In response to GAO revealing that SpaceX proposed as many as 16 launches – including 14 refuelings – spaced ~12 days apart for every Starship Moon lander mission, Musk says that a need for “16 flights is extremely unlikely.” Instead, assuming each Starship tanker is able to deliver a full 150 tons of payload (propellant) into orbit after a few years of design maturation, Musk believes that it’s unlikely to take more than eight tanker launches to refuel the depot ship – or a total of ten launches including the depot and lander.
But, as Musk notes, so long as Starship gets anywhere close to its design objectives, it would be a non-issue even if each Starship Moon lander mission somehow required 16 launches. A step further, assuming that SpaceX proposed 16 launches per mission out of an abundance of conservatism, it’s fair to assume that a 12-day gap between tanker launches is also an extremely conservative worst-case scenario. Per Musk and SpaceX, Starship’s design goals call for multiple reuses of ships and boosters per day. Even if SpaceX falls a full magnitude short of those ambitious goals, Starship tankers should feasibly be able to launch every few days or maybe every week.
But thanks to SpaceX’s relatively conservative proposal, the company now knows that NASA is more than happy with Starship even if it falls something like 50% short of its payload performance goals and two magnitudes short of its reusability goals.
 -
-
Cybertruck
Tesla Cybertruck production snaps back after ugly supplier fight
Cybertrucks are piling up again at Giga Texas after Tesla’s court win against a parts supplier.

Cybertruck production at Giga Texas is showing its first visible recovery since Tesla sued a supplier last month over withheld manufacturing tooling.
Aerial observer Joe Tegtmeyer flew over the Austin factory Wednesday morning and counted roughly 100 or more Cybertrucks filling the outbound lot, a sharp jump from the thin numbers seen in recent weeks. The flyover came a day after a judge granted Tesla a temporary restraining order against Angstrom Automotive Group, the parts supplier at the center of the dispute.
Tesla filed an emergency lawsuit in late July after Angstrom told the automaker it planned to close the Troy, Texas facility where Tesla’s die-cast tools, trim dies and other Cybertruck stamping equipment were housed. According to Tesla’s complaint, a shipment of 700 finished parts never left the building, and when Tesla sent representatives to retrieve its equipment, accompanied by law enforcement, they were turned away. Angstrom allegedly then asked for an extra $250,000 a week to keep operating, which Tesla’s filing described as holding its own property for ransom.
TESLA: U.S. District Judge Christopher R. Wolfe of the U.S. District Court for the Western District of Texas, Waco Division granted Tesla a Temporary Restraining Order and Writ of Replevin in its dispute with Angstrom Automotive (Case No. 6:26-cv-00477).
The order authorizes… https://t.co/E1DKcQSxMn pic.twitter.com/LR8aAiV2Og
— S.E. Robinson, Jr. (@SERobinsonJr) August 5, 2026
The restraining order gives Tesla immediate right of entry to Angstrom’s facility to recover the tooling. It is temporary, with a fuller hearing still to come, but the speed of Wednesday’s rebound suggests the Angstrom shortage was indeed the main bottleneck limiting Cybertruck output. Outbound lot counts are an imperfect measure of actual production, since finished trucks can sit for days before shipping, but a lot that full after a lean stretch is a meaningful signal.
Cybertruck output at Giga Texas has fluctuated all year as Tesla worked through supply issues and introduced new trims, including a cheaper Dual Motor AWD version that drew strong early demand.
Elon Musk
Space finally faced the people living next to its next Terafab mega-project
SpaceX confirmed Terafab’s Grimes County site is locked in, with construction starting within months.
SpaceX and Terafab representatives sat across from Grimes County residents for the first time on Wednesday, telling a packed Commissioners Court room that the $55 billion chip manufacturing project is now a done deal at the Gibbons Creek Reservoir site.
The meeting followed a $10 million check SpaceX sent the county earlier this week, satisfying a payment deadline built into the tax abatement agreement both sides signed in June. Elon Musk shared a post on X confirming the payment, and County Judge Joe Fauth told the San Antonio Express-News his office deposited the check after it beat its deadline.
Wednesday’s session, first reported by KBTX, moved the project from paperwork to construction. Terafab representative Riley Trennell told residents the JETI tax break agreements with Iola ISD and Anderson-Shiro CISD are signed and active, and that civil work and foundation prep are starting almost immediately. Renderings of the facility could be released within days, he said, with construction beginning within months.
The foundations for an exciting future are being built in Texas. Next up: Terafab → https://t.co/jGg52Zhn5I pic.twitter.com/SNfSXNr2tb
— SpaceX (@SpaceX) August 6, 2026
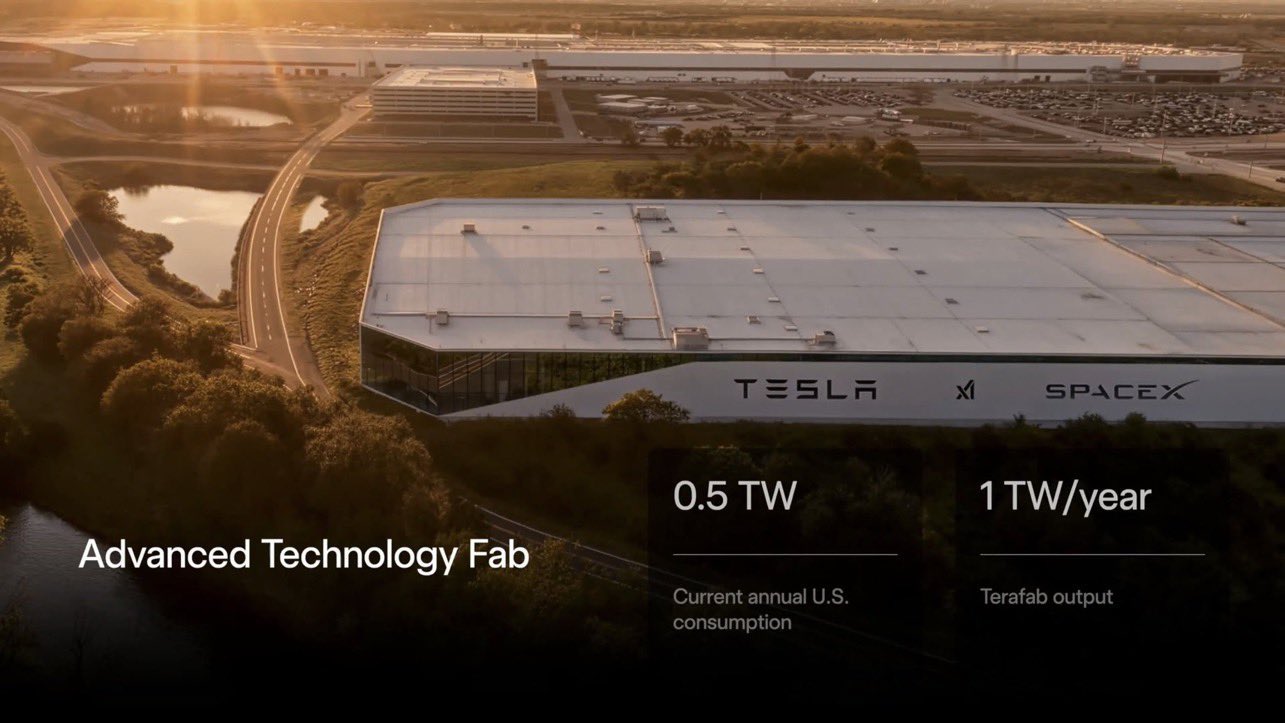
Elon Musk launches TERAFAB: The $25B Tesla-SpaceXAI chip factory that will rewire the AI industry
Musk first announced Terafab in March as a joint venture between Tesla, SpaceX and xAI aimed at producing over a terawatt of AI compute annually, an amount that dwarfs the roughly 20 gigawatts the entire global chip industry produces today. Intel joined as a manufacturing partner in April. Musk has said the project needed its own day in the spotlight rather than being squeezed into an earnings call, and for months the Grimes County site remained unconfirmed even as reporting pointed there.
SpaceX attorney Buck Brannon used Wednesday’s meeting to note that the company’s abatement is roughly 78 percent, not the 100 percent some earlier reports suggested. In exchange, SpaceX will pay Grimes County a fixed $20 million a year for 35 years, a total of $710 million, which Brannon said exceeds the $14 million Tesla paid Travis County in 2025.
SpaceX also addressed environmental concerns that have followed the project since Musk’s Terafab partnership with Intel was announced. Representatives said Terafab will not raise electric bills for other ratepayers, will not deplete local water supplies and will not draw down the Navasota River. SpaceX confirmed it owns the Navasota River pumping station, which it plans to use to divert stormwater into the Gibbons Creek Reservoir, and said it will build its own natural gas plants to power the facility rather than pulling from the ERCOT grid.
Grimes County commissioners also approved an addendum letting county employees use ten approved AI chatbots for work, including Grok.

Elon Musk has declared that SpaceX has effectively solved one of Starship’s most persistent engineering challenges: the reliability of its heat shield tiles.
During the company’s first-ever Earnings Call, the SpaceX CEO stated:
“I don’t want to jinx it or anything, but I think I would call the heat shield problem solved at this point. All indications from data and visual inspection is we have solved it. That doesn’t mean we won’t make improvements, but we do not see any technical obstacles to achieving rapid reusability at this point.”
Starship’s heat shield consists of roughly 18,000 hexagonal ceramic tiles covering the windward side of the upper stage. These tiles form the thermal protection system that shields the vehicle’s stainless-steel structure from the extreme heat of atmospheric reentry.
Elon says he believes the heat shield problem with Starship is currently solved.
He called it “arguably the single biggest problem” pic.twitter.com/eEE9vM5zlz
— TESLARATI (@Teslarati) August 4, 2026
During descent, atmospheric friction generates temperatures exceeding several thousand degrees Celsius and creates plasma flows capable of melting unprotected metal. The tiles absorb, radiate, and insulate against this energy, allowing the vehicle to survive and potentially fly again. Without a durable heat shield, full and rapid reusability, the cornerstone of Starship’s design for frequent launches, satellite deployments, and deep-space missions, would remain impossible.
The tiles have long been a source of difficulty. On earlier test flights, a significant number of tiles detached during ascent due to vibration, aerodynamic loads, and imperfect attachment methods using pins and adhesives. Gaps between tiles allowed hot plasma to infiltrate, causing secondary damage and hot spots on the underlying structure.
These issues echoed challenges faced by NASA’s Space Shuttle, whose ceramic tiles required extensive, labor-intensive inspections and replacements between missions, preventing rapid turnaround. SpaceX has iteratively improved materials, standardized tile shapes, refined attachment techniques, added secondary ablative layers, and tested sealing methods such as “crunch wrap” felt to close gaps.
Progress was visible across Flights 10–12, with steadily better tile retention, yet questions remained about whether the system could support the minimal-refurbishment goal of rapid reuse.
Flight 13 on July 24 provided the decisive evidence. Ship 40 flew a deliberately more demanding profile with higher dynamic pressure to stress the heat shield beyond typical operational loads. It successfully deployed 20 operational Starlink V3 satellites, the first such payload on a Starship mission, performed an in-space Raptor engine relight, and executed a controlled reentry.
Elon Musk sheds two new bits of detail on Starship after 13th test launch
Cameras on six of the satellites and onboard sensors captured extensive imagery and data of the shield throughout the flight. The ship then achieved its softest splashdown to date in the Indian Ocean, remaining intact and floating rather than breaking apart or exploding as on prior missions. This allowed drone inspections and continuous telemetry of the heat shield in near-real time.
Post-flight analysis showed the majority of tiles remaining attached with only minor damage and limited plasma streaking at seams. Musk noted that the mission delivered “all the heat shield data we needed and then some.” Combined with visual inspections, these results underpinned his subsequent assessment that the core technical barriers to rapid reusability have been cleared. While refinements will continue, Flight 13 marked a pivotal step toward Starship’s operational future.

Tesla Cybertruck production snaps back after ugly supplier fight

Space finally faced the people living next to its next Terafab mega-project




