News
SpaceX will host Hyperloop Pod Competition next week, Jan 27-29, 2017

Get ready to see Hyperloop concept pods fire through the 1-mile test track located outside of SpaceX and Tesla’s Design Studio in Hawthorne, California, next week between January 27-29. Elon Musk and SpaceX first unveiled the idea for a new high-speed ground transport system called the Hyperloop on August 12, 2013 with the publication of a white paper, the Hyperloop Alpha Preliminary Design Study. SpaceX’s sponsored Hyperloop Pod Competition is an incentive prize competition created to inspire university students and independent engineering teams to design and build a subscale prototype transport vehicle (a “Hyperloop pod”) that will demonstrate technical feasibility of various aspects of the high speed transportation concept. To support this competition, SpaceX has constructed a test track outside of its headquarters which we had the opportunity to see during early construction last year.
There are three judging phases in the Hyperloop Pod competition: a design competition that was held in January 2016 and an on-track competition to be held January 27–29, 2017 (Competition Weekend I), followed by a Summer 2017 (Competition Weekend II). The original specification for the Competition Basic for the Design Weekend and the competition Weekend I, though no longer available at SpaceX, can still be found online.
DESIGN WEEKEND
The Design weekend was held in January 2016 at Texas A&M University. Awards were given in three categories:
SUBSYSTEM
Best Overall Subsystem Award: Auburn University | Auburn University Hyperloop Team.
DESIGN ONLY
Top Design Concept Award: Universitat Politècnica de Valencia | Makers UPV Team
 -
-
DESIGN AND BUILD CATEGORY OVERALL
Massachusetts Institute of Technology | MIT Hyperloop Team
MIT Hyperloop Team’s design was awarded the “Best Overall Design Award”, among the 23 designs selected to move to the prototype stage. The design proposes a 250 kg (551 lb) pod with a carbon fiber and polycarbonate sheet exterior. It is elevated by a passive magnetic levitation system comprising 20 neodymium magnets that will maintain a 15 mm (0.6 in) distance above the track. The team says with air pressure at 140 Pascals, the pod could accelerate at 2.4 G and have 2 Newton aerodynamic drag when traveling at 110 m/s. The design includes a fail-safe braking system that automatically halts the pod should the actuators or computers fail, and low speed emergency drive wheels that can move the pod 1 m/s. Delft Hyperloop received a “Pod Innovation Award”, while Badgerloop at University of Wisconsin, Madison, Hyperloop at Virginia Tech, and HyperXite at UC Irvine each received a “Pod Technical Excellence Award.” The full list of Awards and news clips from the Design Weekend can be found at the Texas A&M University Engineering web site. Besides the winning teams, several other teams were invited to compete in the upcoming Competition Weekend I from the Design and Build category:
- rLoop (Non-student team)
- University of Waterloo | uWaterloo Hyperloop
- University of Washington | UWashington Hyperloop
- University of Toronto | University of Toronto
- University of Maryland and Rutgers University | RUMD Loop
- University of Florida | GatorLoop
- University of of Colorado, Denver | Team HyperLynx
- University of Cincinnati | Hyperloop UC
- University of California, Santa Barbara | UCSB Hyperloop
- University of California, Berkeley | bLoop
- Texas A&M University | TAMU Aerospace Hyperloop
- Technical University of Munich | WARR Hyperloop
- Purdue University | Purdue Hyperloop Design Team
- Oral Roberts University | Codex
- Lehigh University | Lehigh Hyperloop
- Keio University | Keio Alpha
- Drexel University | Drexel Hyperloop
- Carnegie Mellon University | Carnegie Mellon Hyperloop
In February 3, 2016 eight more teams advanced to Competition Weekend I.
- Cornell University + Harvey Mudd College + University of Michigan + Northeastern University + Memorial University of Newfoundland(Canada) + Princeton University | OpenLoop
- Louisiana State University | Bayou Bengals
- New York University | NYU Hyperloop
- RMIT University | VicHyper
- John’s High School | HyperLift
- University of Illinois at Urbana-Champaign | Illini Hyperloop
- University of Southern California | USC Hyperloop
- University of Wisconsin, Milwaukee | Mercury Three
In the end, 30 of the 115 teams that submitted designs in January 2016 were selected to build hardware to compete in Competition Weekend I. There were more than 1,000 applicants at earlier stages of the competition.
JUDGING CRITERIA
Originally, the second Phase of the competition was supposed to involve competitive runs in the Hyperloop test track to be awarded based on various classes (fully functional pod, susbsystem test pod, etc.) and pod mass. This phase of the competition was renamed“Competition Weekend I,” when SpaceX added a third phase of the competition, Competition Weekend II. The original SpaceX Hyperloop Pod Competition – Rules and Requirements for Weekend I can be seen at the end of this article. We’ve embedded a copy of the original document from SpaceX.
The Judging Criteria are listed in the document, and involve scoring in 4 different categories, for a maximum overall total of 2500 points.
- Category 1: Final Design and Construction (500 points)
- Category 2: Safety and Reliability (500 points)
- Category 3: Performance in Operations (500 points)
- Category 4: Performance in Flight (1000 points)
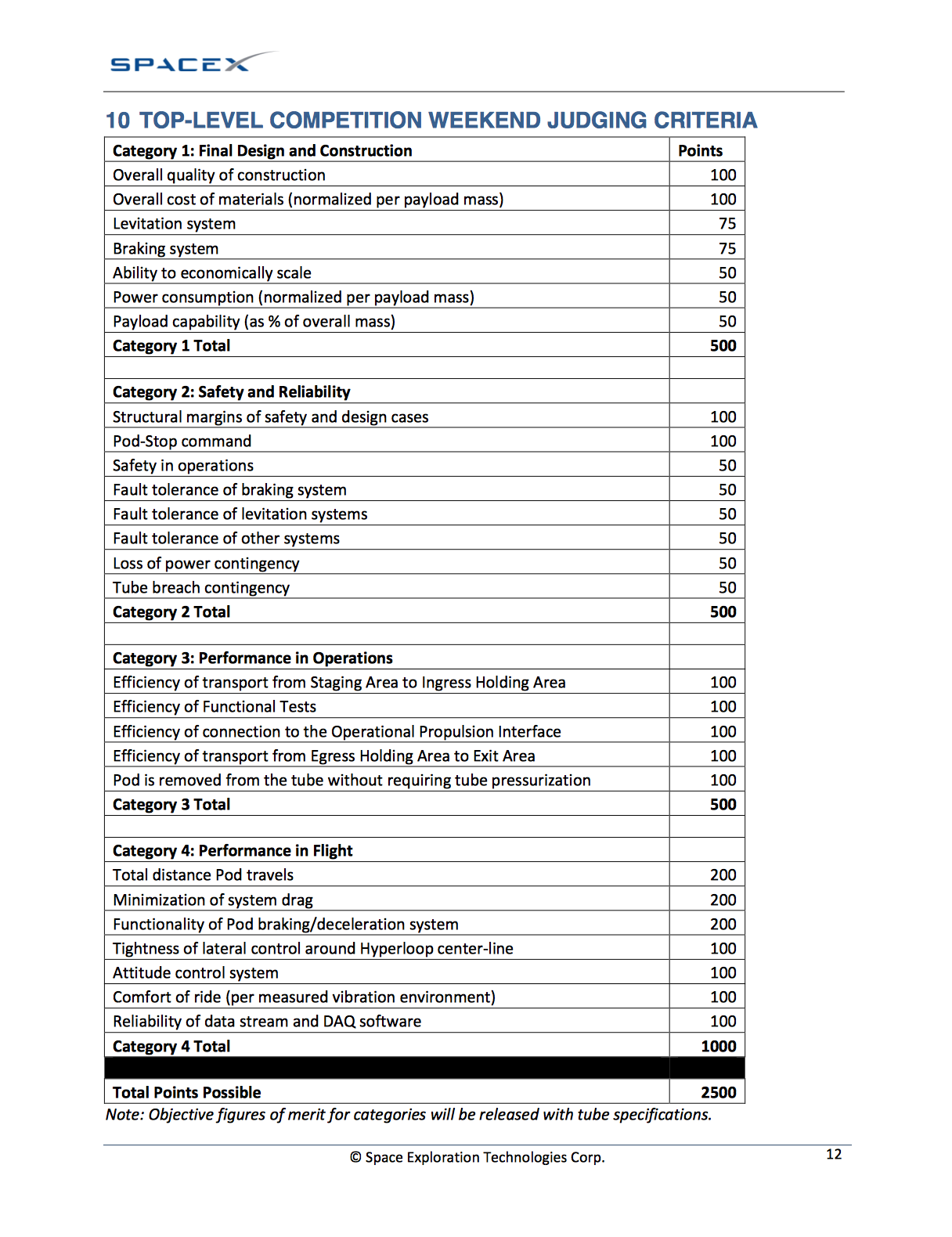
Competition Weekend I Judging Criteria – Source: SpaceX
HYPERLOOP TEST TRACK
AECOM, a company that has designed and built some of the world’s most impressive transportation systems, was selected to design and build the world’s first Hyperloop test track as part of the pod competition hosted by SpaceX

SpaceX Hyperloop Test Track (Jan.7, 2017) [Source: Teslarati via Marco Papa]
The track is a straight one-mile run on Jack Northrop Avenue, between Crenshaw Blvd. and Prairie Ave. The SpaceX Hyperloop test track — or Hypertube — was designed in 2015 and was constructed in the fall 2016, reaching its full length of one mile by October 2016. The test track’s six-foot diameter steel tube includes a non-magnetic sub-track and said to be capable of achieving 99.8 percent vacuum. The test track itself is also a prototype, where SpaceX anticipates learning from the design, build process and evaluates how to apply automated construction techniques to future Hyperloop tracks.
The Hypertube test track is designed to enable competitors who implement a wide array of designs and build pods that will test a variety of subsystem technologies that are important to new vehicle transport systems. This will include Hyperloop-specific pods—with air-bearing suspension and low-pressure compressor designs—as well as wheeled vehicle and magnetic levitation rail designs that will support a wide array of vehicle technologies to be tested. While the Design Weekend held at Texas A&M University was open to the public, it is unclear if the Competition Weekend I will be as well, or if it will be an invitation only event like many of the SpaceX and Tesla events. Several inquiries for tickets posted to the Twitter account of the Hyperloop Pod Competition went unanswered. The Official SpaceX Hyperloop Pod Competition page does not shed any light on who will be able to attend either.
HYPERLOOP POD COMPETITION II
According to SpaceX, “based on the high-quality submissions and overwhelming enthusiasm surrounding the competition, SpaceX is moving forward with a second installment of the competition: Hyperloop Pod Competition II, which will culminate in a second competition in Summer 2017 at SpaceX’s Hyperloop test track. Hyperloop Competition II will be focused on a single criterion: maximum speed. The second competition is open to new student teams interested in competing on the test track, as well as to existing student teams who have already built and tested Pods to further refine their designs.” The Competition Weekend II event will be held in the Summer 2017 at the same SpaceX Hyperloop test track.
-
[pdf-embedder url=”http://www.teslarati.com/wp-content/uploads/2017/01/spacex-hyperloop-competition-rules.pdf”]

Elon Musk
Tesla FSD takes owner on a 20,000+ mile joy ride
Tesla owner David Moss just pushed his intervention free FSD streak past 20,000 miles total.

Tesla Model 3 owner David Moss has spent the better part of eight months turning his vehicle into a rolling stress test for Full Self-Driving, and this week he pushed his single, continuous FSD streak past 20,000 miles without a human intervening.
Moss, a Tacoma, Washington resident who sells LiDAR scanning equipment for a living, first drew wide attention in December 2025 when he logged 10,000 consecutive miles on FSD v14.2. Days later he drove from the Tesla Diner in Los Angeles to Myrtle Beach, South Carolina, covering 2,732 miles in two days and 20 hours with zero disengagements, the first verified coast to coast autonomous drive in Tesla’s history. Tesla even featured the trip as an official customer story in March. That original streak eventually reached 12,961 miles across 30 states before ending in rural Wisconsin in January, when snow and single digit temperatures forced Moss to take over.
Tesla FSD successfully completes full coast-to-coast drive with zero interventions
He started over, and this run has gone further. In late May, Moss drove 3,760 miles across Canada with two companions, from Horseshoe Bay in Vancouver to a Tesla showroom in Halifax, again without a single intervention, a trip Tesla AI software VP Ashok Elluswamy publicly congratulated him for on X. In June, he pushed the same unbroken streak south, aiming to link the Canadian border to the Mexican border, and crossed 10,000 miles on Tesla’s newly added in car streak counter along the way, the first driver to do so since Tesla began showing confetti animations for the feature.
20,000 Mile Tesla FSD Screen Streak!
Special thank you to @DevinOlsenn, @scotsrule08, & @OwenSparks for helping co drive during all these fun adventures these last couple of months
Also thank you to @wholemars for always tracking me along the journey verifying it all with his… pic.twitter.com/CZ2yO6Ev0X
— David Moss (@DavidMoss) July 27, 2026
-
It’s worth noting that every mile is logged through the FSD Database, a community run tracker built by Tesla influencer Omar Qazi, well known as @WholeMars on X, that pulls telemetry straight from the car and records disengagements down to a tenth of a mile. That verification is what separates Moss’s numbers from casual claims on social media.
The streak itself is a fairly recent addition to Tesla’s software. FSD v14.2 introduced a Self Driving Stats panel tracking the ratio of autonomous to manual miles, and v14.3.4 added the live streak counter in June, which resets the moment a driver brakes, wrenches the wheel or cancels navigation. Reaching 20,000 miles on that counter means a single Tesla drove itself through countless highways, city grids, construction zones and Supercharger stalls without a single reset.
Moss has said the goal was never to set a record for its own sake, but to show, mile by verified mile, what the software can already do.

Elon Musk told The Economist that artificial intelligence will likely surpass the combined intelligence of every human on Earth within about five years, and that humans may not remain in charge once that happens. In a wide-ranging interview with editor-in-chief Zanny Minton Beddoes, recorded at Giga Texas for the outlet’s Insider series, Musk compared the widening gap between AI and human intelligence to the gap between humans and chimpanzees.
“It’s hard to imagine that the chimpanzee would be in charge,” he said, addressing what happens to human authority once AI moves far beyond us.
Elon Musk reiterates his most optimistic prediction yet with “UHI” forecast
Musk’s timeline stretches out from there. Five years for AI to out-think humanity combined, ten years before humans lose meaningful control, and by 2036, he says, money itself may stop mattering.
Musk notes that if robots and AI produce more goods and services than people could ever consume, currency loses its purpose. He told Beddoes that governments could respond with direct payments, what he called “universal high income,” a term he first used in an X post last August describing a future where “everyone will have the best medical care, food, home, transport and everything else.”
There will be universal high income (not merely basic income).
Everyone will have the best medical care, food, home, transport and everything else.
Sustainable abundance.
-— Elon Musk (@elonmusk) August 24, 2025
He also floated a more surprising prediction that deflation, and not inflation, would become the bigger economic problem, since expanding the supply of goods and services faster than the money supply grows would push prices down rather than up.
None of this is new territory for Musk, who has spent years describing an “age of abundance” built on Optimus and autonomous vehicles. What’s notable is the timing. The interview landed the same week Tesla shares dropped roughly 19 percent following a second quarter earnings report that beat on revenue but missed badly on profit, and as SpaceX stock continues to slide from its post-IPO peak.
Musk’s own net worth has fallen close to $700 billion since mid-June, according to the Bloomberg Billionaires Index, even as he describes a future where personal wealth stops being the point.
Musk did not dodge the risk side of the equation either. He put the odds of AI contributing to human extinction somewhere in the 10 to 20 percent range, then arrived at what he called his “philosophical conclusion” since the technology cannot realistically be stopped and the arguably better response is to keep building it and hope the outcome leans toward abundance rather than catastrophe. “I’ve gone from exhilaration to terror regarding AI,” he told Beddoes, “even intraday.”
Tesla is adding a new “Traction Control Modes” feature to its cars for better handling in any conditions. These features will roll out to the Model 3 and Model Y, the two vehicles in Tesla’s lineup that typically do not have drive modes for various conditions.
Tesla did include this in the Model S and Model X, as well as the Cybertruck.
The new feature will roll out with the 2026 Summer Update, which Tesla announced last week and subsequently started rolling out to some owners today. The Summer Update is the latest iteration of the usual four seasonal releases the company rolls out throughout the year. These releases typically feature some owner-requested features, as well as improvements to things like the Full Self-Driving suite.
Tesla reveals 2026 Summer Update with crazy fixes to Nav and more
This release is no different. Among the changes are improvements to Navigation, new customization options with wraps and how they can be shared and stored, more functionality with the Tesla smartphone app, and new gamification with self-driving.
However, Tesla announced today that it was adding another feature to the Summer Update. Traction Control Modes will now be available with the release
Tesla describes them:
-
“Choose from three updated Traction Control Modes: Auto for normal driving conditions, Slippery Surface for icy or wet roads, Stuck Assist when stuck in snow, mud, or sand. The mode resets to Auto at the start of each drive. To select, go to Controls > Dynamics > Traction Control Mode.”
Tesla’s 2026 Summer Update also includes new Traction Control Modes
📸: @PatchesHQ https://t.co/N9cD2lGP14 pic.twitter.com/ogLC5ROIgc
— TESLARATI (@Teslarati) July 26, 2026
The use of these modes will help improve a Tesla’s overall performance in less-than-ideal conditions. Typically, these traction control modes monitor wheel speed through sensors and track engine power to adjust responsiveness in various conditions.
These drive modes are not an ultimate solution to all driving conditions; just because there is a “Stuck Assist,” doesn’t mean your Tesla will dig itself out of a foot-and-a-half trench during a blizzard. It is important to remember that some of these scenarios also require some assistance from the driver. For example, driving in sand requires tires to be aired down significantly to increase traction and control.
However, this will be a welcome addition for those who use the Full Self-Driving suite and might not be convinced of its performance in adverse conditions. Some of us prefer to be in control in rain, snow, or ice, which is totally understandable. However, adjusting the Traction Control Mode while utilizing FSD in snow, rain, or ice could increase confidence and overall experience.
-
Tesla’s Summer Update is already rolling out to some owners, so it should be making its way to most of the fleet over the next several weeks. The Spring Update rolled out at a very conservative pace, so if you don’t have it by the end of August, don’t be too upset. It might just be Tesla’s method.

Tesla FSD takes owner on a 20,000+ mile joy ride





