

News
SpaceX putting the finishing touches on Starship’s orbital launch pad
SpaceX appears to have begun tying up a number of loose ends at Starship’s first orbital launch site, potentially setting the stage for major rocket testing CEO Elon Musk has stated could begin next month.
The list of tasks started or completed in just the last week or two is significant and each one is singularly focused on similar goals: pave the way for SpaceX to finish testing the first orbital-class Starship and Super Heavy booster and prepare for the first orbital launch attempt of the largest rocket ever built. While SpaceX’s progress towards those goals over the last several months has been decidedly slow relative to the pace of similar work completed in the very recent past, the nominal timeline Musk recently sketched out suggests that things could once again start to happen at a dizzying rate.
Launch Tower
Kicking off a jam-packed two weeks of minor to major finishing touches, SpaceX rigged Starbase orbital launch tower’s rocket-catching arms to a system of pulleys, and ‘drawworks’ in a process known as “reeving.” Thousands of feet of rope were first threaded from up, down, and through the ~145m (~440 ft) tower to act as a temporary guide for the next step. Once fully rigged, anchored, and attached to the start of the steel cable actually meant to operate the system, the tower’s ‘drawworks’ was activated for the first time to reel in the guide rope – simultaneously installing the steel cable. By November 9th, the process was more or less complete, leaving the steel cable firmly attached to the tower’s giant rocket-catching arms and able to carry their significant weight.
Thanks Ralph and @StarshipGazer! Updated diagram below. pic.twitter.com/lUvcbshKGs— LunarCaveman (@LunarCaveman) November 10, 2021

SpaceX hasn’t quite finished installing those arms and does not appear to have picked up the slack in the cable that will eventually lift them up and down the tower, but the arm assembly’s first real move is likely just a few weeks away. Notably, a bit of scaffolding around the tower’s ‘legs’ still needs to be removed before the catch arms can freely roll up and down rails welded to their exteriors. SpaceX will also need to complete shakedown testing of the arms themselves, ensuring that the massive structures’ hydraulic, electrical, and mechanical systems are all working properly.
In the near future, those arms will be used to grab, lift, and install Super Heavy boosters and stack Starships on top of them, while SpaceX also hopes to eventually use them to catch boosters and ships out of mid-air. At least for the former role, a separate arm visible about halfway up the tower in the photo above will also be crucial. Known as the tower’s Starship quick-disconnect (QD) arm or claw, SpaceX has also made significant progress on the structure, practically completing it in the last few days.
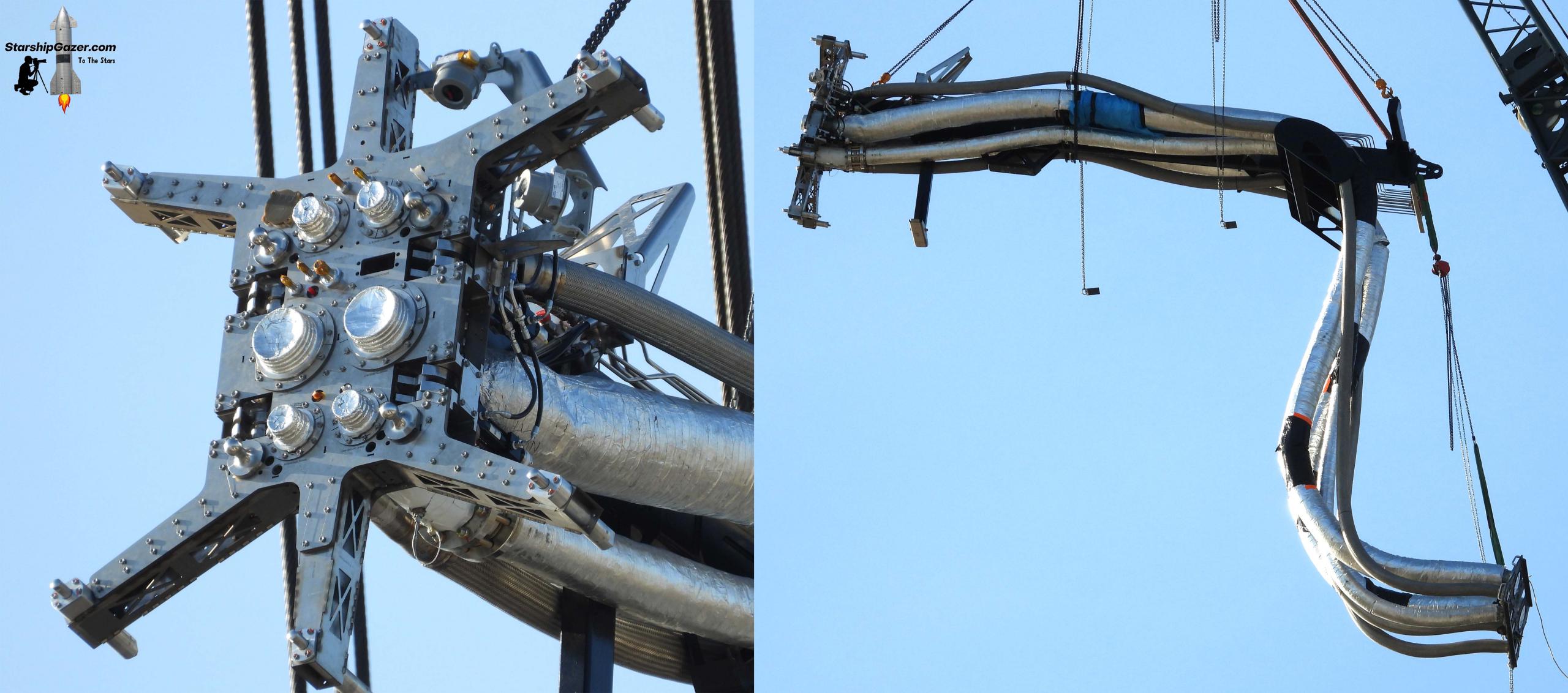


Designed to fuel Starship and stabilize the top of Super Heavy with its claw, the Starship ‘QD arm’ is also able to swing left and right both to quickly back away during launches and to make room for the catch arms during rocket catches and ship/booster stacking operations. Last week, SpaceX technicians finished plumbing the arm, which requires thousands of feet of insulated steel tubes to connect to the pad’s propellant tanks. This week, on November 23rd, SpaceX installed the last major component of the arm – the actual quick disconnect (QD) mechanism that will connect to Starship to supply power, communications, and propellant.
A few small actuators likely still need to be installed and the QD mechanism itself will have to be fully connected to pad systems but the QD arm now appears to be more or less complete and should soon be ready to fuel Starships installed on top of Super Heavy boosters.
Launch Mount
Last but not least, SpaceX performed multiple tests of the pad’s ‘orbital launch mount’ – the giant, steel structure that will support Super Heavy, hold the booster down during testing and before liftoff, and supply it with thousands of tons of propellant. On November 21st, SpaceX completed the first of those tests, seemingly venting an unknown gas out of the mount. More likely than not, it was the first simultaneous test of all 20 of the mounts Raptor Boost engine gas supplies, which – having no need to reignite in flight – will rely on ground gas supplies for ignition. Each of Super Heavy’s 20 outer Raptor engines has a small umbilical and quick disconnect mechanism, resulting in what is likely the most mechanically complex rocket launch mount ever built.
 -
-

On November 22nd, the orbital launch mount’s booster quick disconnect panel actuated for the first time, showing off the first glimpse of how it will move forward to connect to Super Heavy after a booster is installed on the mount. To prevent its sensitive components from being practically incinerated each launch, the mount’s QD panel will also need to rapidly move away from Super Heavy just before liftoff.
Aside from simply avoiding direct impingement from the several-thousand-degree plume created by 29-33 Raptor engines at full thrust, that movement will also tie into some kind of hood, seamlessly actuating hatches that will close to truly protect the device. That hood was itself spotted for the first time on November 21st and will likely be installed on the launch mount and over the naked QD mechanism in the very near future.
Finally, over the last week or so, SpaceX has begun installing a number of new pipes on and around the launch mount, likely assembling a water deluge system that will help manage the extreme thermal and acoustic environment created by the most powerful rocket in history shortly before and after liftoff. When activated, a spray bar circling the mount’s full interior circumference will likely unleash several tons of water per second in a giant artificial waterfall, hopefully preventing Super Heavy from damaging itself with the sheer sound produced by its Raptor engines or violently eroding the surrounding pad or launch mount legs with its plume.
Ultimately, once all the tower, arm, and mount work described above is completed, the only obvious thing standing between the orbital launch pad and the first Super Heavy booster testing and first orbital Starship launch will be the delivery of liquid methane fuel, which could easily begin any day now.
 -
-

Tesla is one of several automakers whose vehicles qualify for an awesome new first-time EV buyer incentive program in California.
The Golden State launched the MyFirstEV incentive program, which helps those buying an electric vehicle for the first time with a $3,500 incentive on new-inventory purchases of a Model 3 or Model Y.
First-time electric vehicle buyers in California can now get $3,500 off eligible Model 3 and Model Y new inventory vehicle purchases.
To be eligible, you must place your order on or after August 3, 2026 and take delivery while funds are still available. The incentive applies to… pic.twitter.com/yuXF00XA50
— Sawyer Merritt (@SawyerMerritt) August 4, 2026
The incentive requires an order on or after August 3, and delivery must be taken while the program is still being funded. California has set aside $135.5 million to help strengthen its SEV market and support automotive innovation.
Incentives are offered at the point of sale, and used EVs are also available for a partial incentive of $1,750. Half of the $3,500 and $1,750 incentive amounts are covered by California, with the other half being covered by participating OEMs.
Additionally, rules apply for MSRP and how the vehicle will qualify for the incentive. Any vehicle from a non-California headquartered OEM must have an MSRP of $50,000 or less. Used vehicles must be priced at $25,000 or less and must be at least two model years older than the year of purchase.
The cars must also be purchased from manufacturers as certified pre-owned vehicles. Private dealerships are not eligible.
In total, California expects to incentivize over 73,000 ZEVs.
Participating Manufacturers
Fourteen total automakers are participating in California’s MyFirstEV program:
- Chevrolet – Launching August 2026
- Ford – Launching August 2026
- Honda – Launching September 2026
- Hyundai – Launching August 2026
- Kia – Launching August 2026
- Lexus – Launching September 2026
- Lucid – Launching August 2026
- Mitsubishi – Launching November 2026
- Nissan – Coming Soon
- Rivian – Coming Soon
- Subaru – Launching September 2026
- Tesla – Launching August 2026
- Toyota – Launching September 2026
- Volvo – Coming Soon

Elon Musk’s space exploration company, SpaceX (NASDAQ: SPCX), is set to report its earnings for the second quarter today in what will be its first-ever earnings call since going public in July.
SpaceX is trading down roughly 25 percent from its IPO. These early stock signals are usually a bit tumultuous, and considering this is the first company actively launching rockets that is available on the stock exchange, investors might have a tendency to be a bit skittish.
However, there are going to be some details that investors will hear for the first time today on the earnings call. Here’s what to look for:
Wall Street Expectations
Revenue is expected to fall somewhere around $6.8 billion, and will be heavily driven by Starlink, which is SpaceX’s widely popular satellite internet platform that has been adopted by numerous airlines, cruise ships, and other maritime operations. It is also available for consumers at home or in their cars.
Earnings Per Share (EPS) expectations fall at a net loss of $0.23 per share. Wall Street sees this as a total net loss of roughly $1.9 billion.
EBITDA is expected to come in between $2 billion and $2.1 billion.
What Investors Want to Know
Tesla uses the Say platform to help work with both retail and institutional investors to answer relevant and quality questions that address concerns or questions that they might have.
However, SpaceX is doing things differently, as the company launched its own Investor Relations website where these questions are being fielded. Just like the Tesla questions, they seem to be less focused on the operational tasks and overall progress of the company, and more novelty.
Here are the top five:
- Has the team thought about what possibilities there are with your mascot Asteroid? Whether it’s starting additional foundations for kids in its name, helping kids learn about space, etc. Kids are our future, and Asteroid would be a fun and easy way to help.
- Baby Asteroid is already making a difference through charity around the world. Could SpaceX take it even further with programs that inspire kids to explore space?
- SpaceX has some legendary vehicle names. Would you ever allow the public to name a Starship, even knowing there is a 99% chance it becomes Shipy McShipface?
- When can we expect to see more footage of the Human Landing System?
- Will Asteroid (your mascot) go to Mars?
SpaceX will report its earnings today, August 4, at 4:30 P.M. EDT.

Lemonade has expanded its innovative Autonomous Car insurance program to Tennessee, giving Tesla owners in the state a substantial discount on Full Self-Driving (FSD) miles. Announced on August 3, the product offers 50 percent off every mile driven with FSD activated, positioning the digital insurer as a leader in pricing insurance around autonomous technology.
The program, marketed as Lemonade Autonomous Car insurance, uses a direct connection via Tesla’s Fleet API (with customer permission) to automatically distinguish FSD-engaged miles from manual driving. Policyholders pay a low base rate when the vehicle is stationary and a few cents per mile when moving, with the 50 percent reduction applied specifically to FSD miles.
If you’re driving a Tesla in Tennessee, FSD miles now cost 50% less to insure with Lemonade. Autonomous Car is now live in TN.https://t.co/4CDTuhyORi pic.twitter.com/QZk4LBIs6f
— Lemonade (@Lemonade_Inc) August 3, 2026
Coverage includes standard protections such as liability, collision, comprehensive, roadside assistance, and Tesla-specific benefits like access to certified repair shops and emergency crash services. Eligible vehicles require Hardware 4, as well as recent firmware.
Lemonade first unveiled the product on January 21 of this year, describing it as a first-of-its-kind offering designed for self-driving cars, starting with Tesla FSD. It began rolling out in Arizona on January 26, followed by Oregon about a month later. Subsequent expansions brought it to Indiana in early June 2026 and Colorado later that month.
Tennessee marks the fifth state.
Tesla Full Self-Driving gets outrageous insurance offer with insanely cheap rates
The discount rests on Lemonade’s strong belief in the safety of Tesla’s FSD system. The company cites Tesla’s data showing that FSD-driven miles are twice as safe as those driven manually, or associated with roughly a 50 percent crash reduction.
Lemonade Co-founder and President Shai Wininger has emphasized this distinction: “Traditional insurers treat a Tesla like any other car, and AI like any other driver. But a car that sees 360 degrees, never gets drowsy, and reacts in milliseconds can’t be compared to a human.”
He added that “Teslas driven with FSD are involved in far fewer accidents” and committed that as FSD software improves and becomes safer, Lemonade’s prices will drop further.
Tesla Full Self-Driving gets an offer to be insured for ‘almost free’
This approach leverages Lemonade’s existing pay-per-mile technology and AI-driven risk models, which analyze nuanced vehicle data including software version and sensor performance. The company expects the model to reward higher FSD usage with greater savings while supporting mixed households that include both Tesla and non-Tesla vehicles under one policy. Bundling with home, renters, or pet insurance can yield additional discounts.
As autonomous driving technology advances, Lemonade’s state-by-state expansion of usage-based pricing that directly reflects real-world safety data represents a notable shift in how insurers evaluate risk.
Tesla owners in the five available states – Arizona, Oregon, Indiana, Colorado, and now Tennessee – can obtain quotes quickly through the Lemonade app or website, potentially lowering the overall cost of ownership for vehicles equipped with advanced driver-assistance systems. Further states are expected as regulatory approvals progress.

Tesla qualifies for awesome new first-time EV buyer incentive in California

SpaceX to report first-ever earnings today: here’s what to expect





