
Tesla has filed a new patent for “Parallel Processing System Runtime State Reload,” comprising of a system of three or more processors working in conjunction to effectively eliminate the possibility of hardware failure during the use of Autopilot or Full Self-Driving. The patent outlines a robust system of parallel processors that can operate in the event that one of them fails or experiences a runtime state error. “Should one of the parallel processors fail, at least one other processor would be available to continue performing autonomous driving functions,” the patent shows.
The patent was filed and published on August 26th and comes just a week after the company’s Artificial Intelligence Day event that was held last Thursday. Outlining a system of at least three processors operating in parallel, it is monitored by circuitry and can locate and identify if one of the three parallel-operating processors is having a runtime state error. The circuitry will then identify a second processor to switch to in the event of a runtime error, access the runtime state of the second processor, and load the runtime state of the second, operational processor into the first processor, which is experiencing a runtime error.
(Credit: Tesla)
Tesla describes the patent in detail:
“A system on a Chip (SoC) includes a plurality of processing systems arranged on a single integrated circuit. Each of these separate processing systems typically performs a corresponding set of processing functions. The separate processing systems typically interconnect via one or more communication bus structures that include an N-bit wide data bus (N, an integer greater than one). Some SoCs are deployed within systems that require high availability, e.g., financial processing systems, autonomous driving systems, medical processing systems, and air traffic control systems, among others. These parallel processing systems typically operate upon the same input data and include substantially identical processing components, e.g., pipeline structure, so that each of the parallel processing systems, when correctly operating, produces substantially the same output. Thus, should one of the parallel processors fail, at least one other processor would be available to continue performing autonomous driving functions.”
Technically speaking, the autonomous vehicle needs only one processor to function as described in an accurate fashion. However, these processors can be overloaded with data when loading into the Neural Network and could experience short-term and non-permanent operational errors. When this occurs, the system would then switch to one of the other processors for normal operation, with at least two backup processors in this patent, as it repeatedly mentions a series of three.
Tesla details its self-driving Supercomputer that will bring in the Dojo era
The second processor would then activate and load the runtime state into the first processor to make the primary processor chip operational once again:
“Thus, in order to overcome the above-described shortcomings, among other shortcomings, a parallel processing system of an embodiment of the present disclosure includes at least three processors operating in parallel, state monitoring circuitry, and state reload circuitry. The state monitoring circuitry couples to the at least three parallel processors and is configured to monitor runtime states of the at least three parallel processors and identify a first processor of the at least three parallel processors having at least one runtime state error. The state reload circuitry couples to the at least three parallel processors and is configured to select a second processor of the at least three parallel processors for state reload, access a runtime state of the second processor, and load the runtime state of the second processor into the first processor.”
 -
-
The purpose of this patent is to continue system availability, even when the primary processor is experiencing functionality issues due to overuse. The two additional processors essentially act as “backup” and can determine whether autonomous driving systems are meant to be enabled if the first processor experiences an error. “With one particular example of this aspect, the parallel processing system supports autonomous driving and the respective sub-systems of the at least three parallel processors are safety sub-systems that determine whether autonomous driving is to be enabled.”
FIG. 13 is a timing diagram illustrating clocks of the circuits of FIGS. 8 and 10 according to one or more other described embodiments. As shown, the runtime state (data1) of first processor/first sub-system is determined to have at least one error. In response to this determination by the state monitoring/state reload circuitry, the signal st_reload1 is asserted to initiate the loading of runtime state (data2) from second processor/second sub-system into the first processor/first sub-system. With the embodiment of FIG. 13, a first clock (clk1) is used for the first processor/first sub-system and a second clock (clk1) is used for the second processor/second sub-system. There exists a positive skew between the first clock (clk1) and the second clock (clk2), resulting in a late cycle of the loading of the runtime state (data2) of the second processor/second sub-system into the first processor/sub-system, potentially resulting in errors in the runtime state reload process. (Credit: U.S. Patent Office)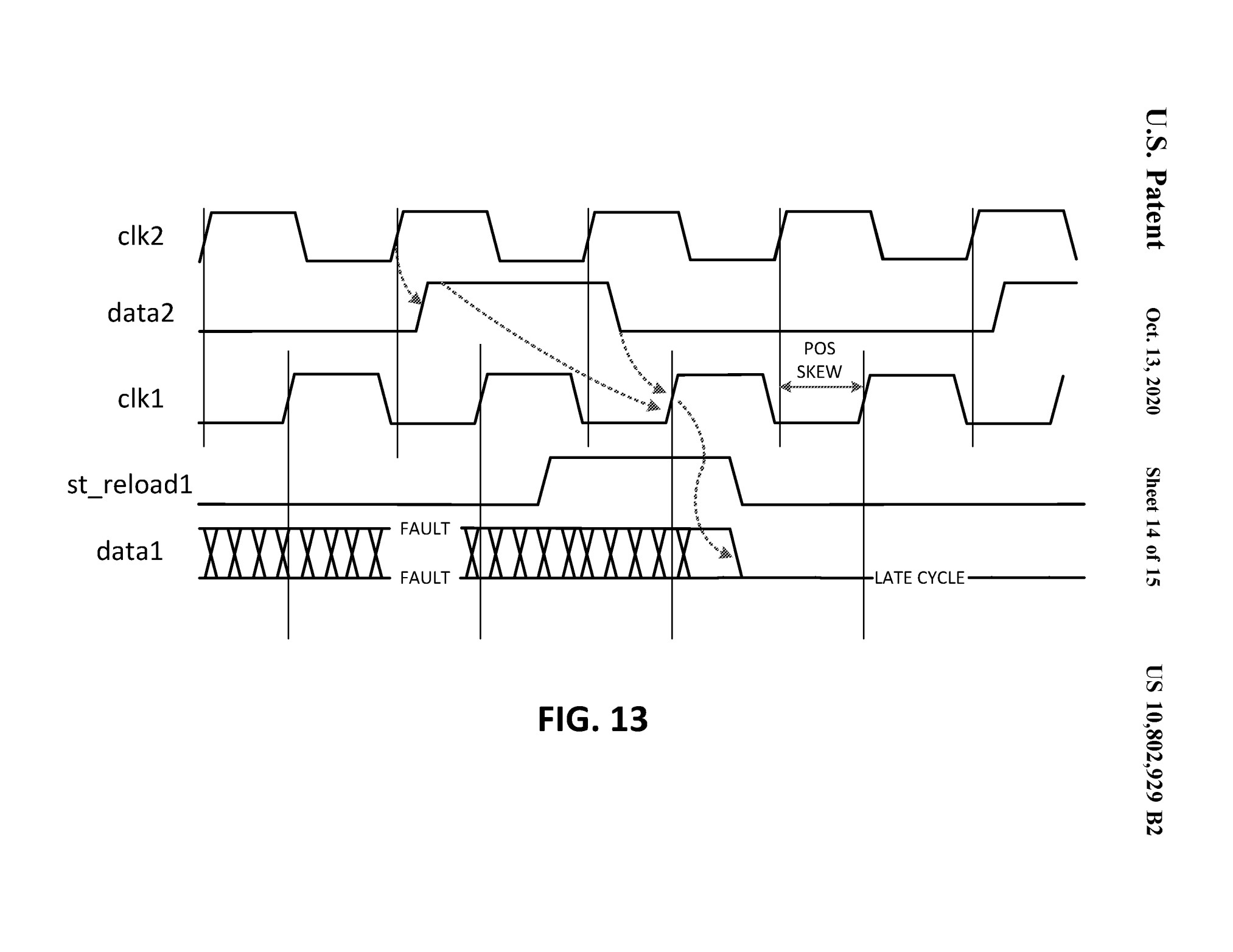
It also appears that this patent aligns with Tesla CEO Elon Musk’s previous description of the Dojo self-driving Supercomputer, which was detailed at AI Day. To increase the accuracy and encourage the parallel operation of the processors, the system will utilize a clock input to calibrate the two processors, increasing the accuracy of the system.
Tesla has focused on accurate FSD operation and has revised its strategy on several occasions. After moving to a camera-only approach earlier this year for the Model 3 and Model Y, the company is experiencing more accurate FSD operation through the harmonized processing of its eight exterior cameras. The operation of internal processors, which are responsible for compiling, compressing, and sending data to the Neural Network, can fail temporarily, so the presence of backup processors to continue comprehending self-driving data is a positive idea.
The full patent is available below:
Tesla Patent Parallel Processing System Runtime State Reload by Joey Klender on Scribd
 -
-

Tesla’s AI lead Ashok Elluswamy doubled down on the company’s strategy regarding Full Self-Driving’s speed settings, and owners are definitely confused.
Earlier versions of Full Self-Driving allowed owners to set a max speed that the vehicle could travel while operating under the semi-autonomous driver assistance platform. This allowed more customization for the driver, giving them the ability to experience FSD’s robust performance with their own personal preferences.
Speed is massively important for obvious reasons — it’s not only a question of keeping the vehicle occupants comfortable by traveling at a safe speed, but it’s also something that could contribute to a ticket or infraction from law enforcement.
With the release of FSD v14 last year, Tesla removed the ability to set a max speed and instead opted for five Speed Profiles, ranging from “Sloth,” the most conservative, to “Mad Max,” the most aggressive and spirited. These profiles not only control speed, but also how frequently the vehicle will execute passes, perform lane changes, and other contributing factors.
The removal of the Max Speed setting was a major complaint amongst the Tesla community because it left owners scrambling for a way to experience suitable behaviors while traveling at an appropriate speed. Most felt the driving profiles would be a good indicator of the behaviors, while speed would still be left up to the discretion of the driver.
Instead, Tesla’s Speed Profiles determine both, and the constant tinkering of how they behave has been a major bottleneck and point of confusion for both owners and the company. From update to update, the Speed Profiles will change, sometimes more drastically than others. Some owners have complained that the “Standard” profile is too fast, while others have experienced “Mad Max” traveling below the speed limit:
What has happened to Mad Max?
At one point it was going 32 in a 35. Traffic ahead had pulled away considerably https://t.co/bjKvaMVTNX pic.twitter.com/aaZSWmLu5v
-— TESLARATI (@Teslarati) January 24, 2026
These things change with each update, but the big complaint is that owners are on the hook for any tickets that come from FSD’s infractions; that’s the caveat of the suite being named FSD (Supervised). It ultimately means the driver is responsible, and the automaker has no liability when it comes to speeding tickets or general traffic infractions.
It is the driver’s responsibility to take over or adjust based on this.
Elluswamy essentially confirmed that there are no plans to bring back Max Speed control, because it is what he referred to as “an anti pattern.” He then echoed something that CEO Elon Musk has started to really push with FSD, and that’s the idea that Tesla is really honing in on the preferences of the driver.
Max speed control is an anti pattern.
We are working on better learning of user’s implied preferences.
— Ashok Elluswamy (@aelluswamy) August 3, 2026
-
Owners were confused by Tesla’s decision, stating that there must be a better way, especially considering disengagements for incorrect speeds are common:
This…. is not the way
— Kyle Conner (@itskyleconner) August 4, 2026
😭 I appreciate this mentality ! But currently the no.1 reason I disengage in Australia is incorrect speed zones.
— Ryan’s Model Y (@ryanjaycowan) August 3, 2026
This is fine but you need to start accepting liability for speeding tickets then. https://t.co/lyCgdA83gQ
— Jeremy Judkins (@jeremyjudkins_) August 4, 2026
-
Okay https://t.co/nOvoXQkNg1 pic.twitter.com/jGRtF2xtox
— Chad Moran (@ChadMoran) August 3, 2026
From personal experience and using FSD for over 72 percent of my driving miles since v14 was released late last year, I make Speed Profile adjustments constantly. If FSD is traveling a tad too quickly, I will scale it back, and if it’s too conservative, I’ll make it more aggressive.
I don’t complain about making the Speed Profile changes too frequently, but it would certainly be nice to have it happen less frequently. There are far too many times I am concerned about getting a ticket, even in Standard mode.
The biggest issue for me, personally, which seems to be echoed throughout the community, is the fact that Tesla’s goal is to minimize disengagements. Many drivers are stating that speed is a major reason for disengagements.
However, Tesla is not willing to bring back this one level of input because it would technically be a regression.
-
Whether it’s right or wrong in your opinion, it is what Tesla is going with, and it seems like it has pivoted quite a bit from its other strategies for minimizing interventions by pushing its AI to behave in a way that would fit the occupant’s personal preferences.

Tesla is one of several automakers whose vehicles qualify for an awesome new first-time EV buyer incentive program in California.
The Golden State launched the MyFirstEV incentive program, which helps those buying an electric vehicle for the first time with a $3,500 incentive on new-inventory purchases of a Model 3 or Model Y.
First-time electric vehicle buyers in California can now get $3,500 off eligible Model 3 and Model Y new inventory vehicle purchases.
To be eligible, you must place your order on or after August 3, 2026 and take delivery while funds are still available. The incentive applies to… pic.twitter.com/yuXF00XA50
— Sawyer Merritt (@SawyerMerritt) August 4, 2026
The incentive requires an order on or after August 3, and delivery must be taken while the program is still being funded. California has set aside $135.5 million to help strengthen its SEV market and support automotive innovation.
Incentives are offered at the point of sale, and used EVs are also available for a partial incentive of $1,750. Half of the $3,500 and $1,750 incentive amounts are covered by California, with the other half being covered by participating OEMs.
-
Additionally, rules apply for MSRP and how the vehicle will qualify for the incentive. Any vehicle from a non-California headquartered OEM must have an MSRP of $50,000 or less. Used vehicles must be priced at $25,000 or less and must be at least two model years older than the year of purchase.
The cars must also be purchased from manufacturers as certified pre-owned vehicles. Private dealerships are not eligible.
In total, California expects to incentivize over 73,000 ZEVs.
Participating Manufacturers
Fourteen total automakers are participating in California’s MyFirstEV program:
- Chevrolet – Launching August 2026
- Ford – Launching August 2026
- Honda – Launching September 2026
- Hyundai – Launching August 2026
- Kia – Launching August 2026
- Lexus – Launching September 2026
- Lucid – Launching August 2026
- Mitsubishi – Launching November 2026
- Nissan – Coming Soon
- Rivian – Coming Soon
- Subaru – Launching September 2026
- Tesla – Launching August 2026
- Toyota – Launching September 2026
- Volvo – Coming Soon

Elon Musk’s space exploration company, SpaceX (NASDAQ: SPCX), is set to report its earnings for the second quarter today in what will be its first-ever earnings call since going public in July.
SpaceX is trading down roughly 25 percent from its IPO. These early stock signals are usually a bit tumultuous, and considering this is the first company actively launching rockets that is available on the stock exchange, investors might have a tendency to be a bit skittish.
However, there are going to be some details that investors will hear for the first time today on the earnings call. Here’s what to look for:
Wall Street Expectations
Revenue is expected to fall somewhere around $6.8 billion, and will be heavily driven by Starlink, which is SpaceX’s widely popular satellite internet platform that has been adopted by numerous airlines, cruise ships, and other maritime operations. It is also available for consumers at home or in their cars.
Earnings Per Share (EPS) expectations fall at a net loss of $0.23 per share. Wall Street sees this as a total net loss of roughly $1.9 billion.
EBITDA is expected to come in between $2 billion and $2.1 billion.
What Investors Want to Know
Tesla uses the Say platform to help work with both retail and institutional investors to answer relevant and quality questions that address concerns or questions that they might have.
-
However, SpaceX is doing things differently, as the company launched its own Investor Relations website where these questions are being fielded. Just like the Tesla questions, they seem to be less focused on the operational tasks and overall progress of the company, and more novelty.
Here are the top five:
- Has the team thought about what possibilities there are with your mascot Asteroid? Whether it’s starting additional foundations for kids in its name, helping kids learn about space, etc. Kids are our future, and Asteroid would be a fun and easy way to help.
- Baby Asteroid is already making a difference through charity around the world. Could SpaceX take it even further with programs that inspire kids to explore space?
- SpaceX has some legendary vehicle names. Would you ever allow the public to name a Starship, even knowing there is a 99% chance it becomes Shipy McShipface?
- When can we expect to see more footage of the Human Landing System?
- Will Asteroid (your mascot) go to Mars?
SpaceX will report its earnings today, August 4, at 4:30 P.M. EDT.

Tesla’s AI lead doubles down on FSD’s speed strategy, and owners are confused

Tesla qualifies for awesome new first-time EV buyer incentive in California





