

It appears that Tesla’s internal beta of FSD Beta 10.13 was successful, as reports recently emerged that the highly-anticipated iteration of the advanced driver-assist system has started rolling out to consumer vehicles. A good portion of the update’s release notes has also been shared online.
As former Tesla AI Director Andrej Karpathy announced his departure from the company last week, CEO Elon Musk remarked that FSD Beta 10.13 should handle some tough left turns. Musk also remarked that the recent 10.x updates of FSD Beta are already “mostly at v11” in terms of their capabilities, though FSD Beta v11 itself should still be released hopefully next month.
Interestingly enough, one of the first observed vehicles that received FSD Beta 10.13 was a Model Y from Gigafactory Texas, a vehicle with a 4680 battery pack. This is quite an interesting development, as FSD Beta and 4680 battery packs are among Tesla’s most important projects in recent years.
Just as stated by Elon Musk, FSD Beta 10.13’s release notes directly reference beta tester Chuck Cook’s extremely challenging unprotected left turn, as well as other notable improvements on false positives and false slowdowns around crosswalks. While FSD Beta 10.13 would most definitely not be the final iteration of the advanced driver-assist system, it promises to be a substantial improvement overall.
Following are (partial) release notes of FSD Beta v10.13.
FSD Beta v10.13 Release Notes
- Improved decision making for unprotected left turns using better estimation of ego’s interaction with other objects through the maneuver.
- Improved stopping pose while yielding for crossing objects at “Chuck Cook style” unprotected left turns by utilizing the median safety regions.
- Made speed profile more comfortable when creeping for visibility, to allow for smoother stops when protecting for potentially occluded objects.
- Enabled creeping for visibility at any intersection where objects might cross ego’s path, regardless of presence of traffic controls.
- Improved lane position error by 5% and lane recall by 12%…
- Improved lane position error of crossing and merging lanes by 22% by adding long-range skip connections and a more powerful trunk to the network architecture.
- Improved pedestrian and bicyclist velocity error by 17%, especially when ego is making a turn, by improving the onboard trajectory estimation used as input to the neural network.
- Improved animal detection recall by 34% and decreased false positives by 8% by doubling the size of the auto-labeled training set.
- Improved detection recall of far away crossing vehicles by 4% by tuning the loss function used during training and improving label quality.
- Improved the “is parked” attribute for vehicles by 5% by adding 20% more examples to the training set.
- Upgraded the occupancy network to detect dynamic objects and improved performance by adding a video module, tuning the loss function, and adding 37k new clips to the training set.
- Reduced false slowdowns around crosswalks by better classification of pedestrians and bicyclists as not intending to interact with ego.
- Reduced false lane changes for cones or blockages by preferring gentle offsetting in-lane where appropriate.
- Improved in-lane positioning on wide residential roads.
- Improved object future path prediction in scenarios with high yaw rate.
- Improved speed limit sign accuracy on digital speed limits by 29%, on signs with difficult relevance by 23%, on 3-digit speeds by 39%, and on speed limit end signs by 62%. Neural network was trained with 84% more examples in the training set and with architectural changes which allocated more compute in the network head.
Don’t hesitate to contact us with news tips. Just send a message to simon@teslarati.com to give us a heads up.
News
Tesla’s AI Chief just hinted at something big for FSD v14 lite owners
Tesla’s AI chief suggests the newest FSD v14 Lite build may finally go wide release.

Tesla’s head of AI, Ashok Elluswamy, noted on Sunday that the newest FSD v14 Lite build rolling out to Hardware 3 cars is likely the version that goes to wide release, the strongest signal yet that Tesla is near to closing out an early access phase that Hardware 3 owners have waited more than a year for.
Elluswamy made the comment in response to an extensive review from Tesla owner Zack, known on X as @BLKMDL3, who tested software version 2026.20.6.10 and detailed the changes in a lengthy post. “FSD v14 Lite (for Tesla AI3 hardware vehicles) review.
The update restarts a rollout that had stalled after its initial release. Tesla began pushing FSD v14 Lite to Hardware 3 early access drivers on June 29, bringing driving behavior learned on the newer Hardware 4 computer down to the more limited chip that has powered Tesla vehicles built between 2019 and early 2023. That release, as we covered in detail, gave roughly 4 million HW3 vehicles their first meaningful update since being frozen on version 12.6 in early 2025.
Tesla Full Self-Driving v14 ‘Lite’ Release Notes: new capabilities and features
The latest build adds features that bring Hardware 3 closer in line with what Hardware 4 owners already have. FSD can now start directly from park without a brake pedal confirmation, a change Zack called a small but meaningful quality of life improvement. The interface also picks up the blue “P” park icon, approaching destination alerts, and a dedicated Self-Driving app with streak tracking, all details previously exclusive to the AI4 branch of v14, as outlined in Tesla’s original release notes.
The stakes around Hardware 3 go beyond software polish. Tesla sold the Full Self-Driving package for years on the promise that every vehicle equipped with it had the hardware needed to eventually drive itself without supervision. That promise broke down during Tesla’s Q1 2026 earnings call, when Musk acknowledged HW3 cars could not run unsupervised FSD, prompting Tesla to offer trade-in discounts and hardware retrofits alongside the Lite software track.
Tesla confirmed HW3 can’t do Unsupervised FSD but there’s more to the story
Tesla has continued to frame v14 Lite as the primary path forward for the HW3 fleet, telling owners in April that international markets would follow the U.S. rollout once regulatory approvals came through. For now, HW3 owners in the early access group are the only ones running the new build. A broader rollout would mark the second major software delivery to the legacy fleet since Tesla first released FSD v14 to Hardware 4 vehicles, and the first sign since June that the Lite program is still moving rather than stuck in early access limbo.

In a pointed message on X, Elon Musk warned that firms maintaining significant short positions in SpaceX over time face “very low” survival probability.
The statement comes amid post-IPO volatility for the rocket company, now trading under the ticker $SPCX.
The survival probability of firms who maintain a significant short position in SpaceX over time is very low
— Elon Musk (@elonmusk) July 17, 2026
Five weeks after what was described as the largest IPO in history, the stock had fallen roughly 30% from its peak above $2.6 trillion, briefly surpassing Microsoft and Amazon in market value. Short sellers celebrated gains of about $8.7 billion, but Musk’s reply underscores his long-term conviction.
The warning directly echoes a detailed bullish analysis arguing that Starship’s cost reductions could unlock a multi-trillion-dollar space economy. Projects ranging from solar power beamed from orbit and asteroid mining to orbital data centers and Mars terraforming were projected to create over $100 trillion in new market capitalization.
In this vision, SpaceX acts as the essential infrastructure provider, akin to AWS for cloud computing, capturing monopoly-like revenues from launches, crew transport, and data traffic across a rapidly expanding frontier.
This is far from the first time Musk has targeted short sellers. With Tesla, he has repeatedly framed persistent bears as destined for major losses. In July 2024, Musk declared that once Tesla achieves full autonomy and volume production of Optimus robots, “anyone still holding a short position will be obliterated. Even Gates,” referencing Microsoft co-founder Bill Gates’ reported short bets.
Elon Musk reveals what Tesla stock surge could do to Bill Gates
Earlier, in 2018, he taunted shorts that they had “about three weeks before their short position explodes,” a remark followed by sharp stock gains. Musk has also called short selling “value destroying” and once suggested it “should be illegal,” viewing it as betting against innovation and progress.
Critics often dismiss Musk’s optimism as hype, especially when near-term metrics like quarterly deliveries or stock fluctuations disappoint.
Yet his pattern remains consistent: framing short positions against his companies as fundamentally misjudging exponential technological leaps. For SpaceX shorts, the message is clear: betting against multi-planetary ambitions and the infrastructure monopoly they enable carries existential risk for the firms involved.
As Musk and supporters see it, the space economy’s upside dwarfs Earth-bound valuation models, making today’s dips temporary in a decades-long ascent.
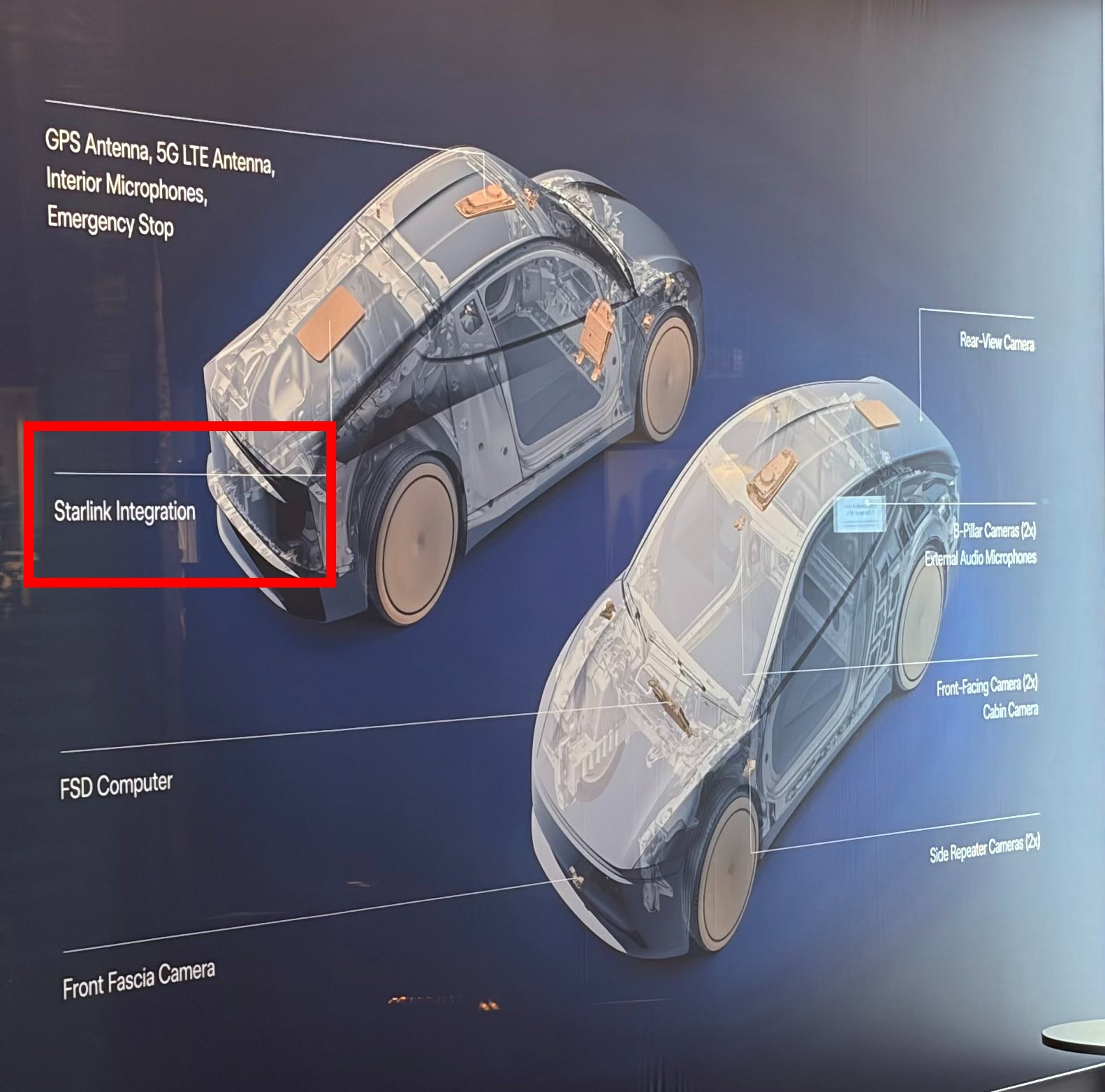
Tesla has evidently revealed which of its vehicle models will be the first to receive Starlink integration: the Cybercab.
Tesla’s Santana Row showroom now has a full-fledged display of the Cybercab, with an extensive bit of information hung around an exhibit that seems to reveal the vehicle’s newest feature: an integrated Starlink antenna that will enable secure and reliable internet access during trips.
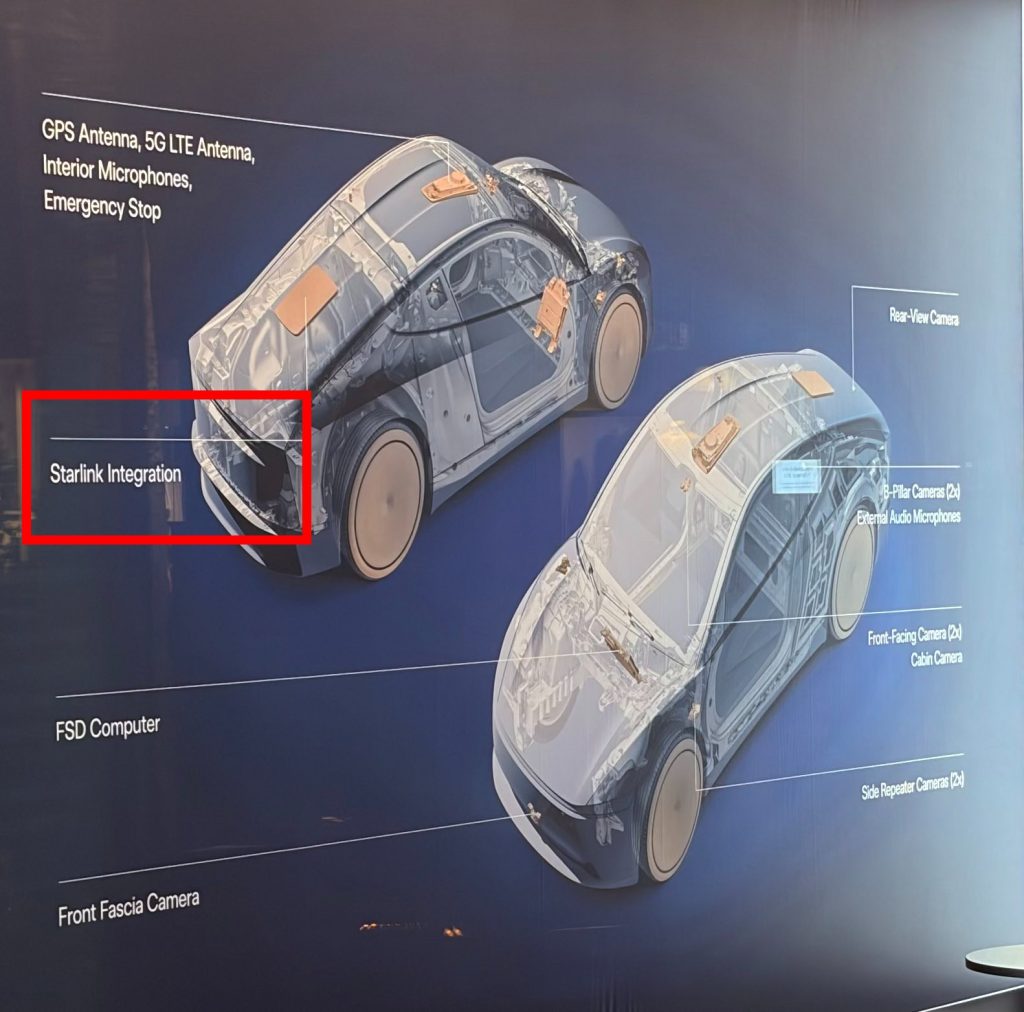
Credit: @Starscream_SJC | X
Cybercab is geared toward autonomous ride-hailing for one or two passengers. The production units rolling off the lines at Gigafactory Texas are built without steering wheels or pedals, meaning when public rides begin, passengers will not need to interact with a human being or control the vehicle in any way outside of what appears on the center screen for their entertainment during the ride.
Tesla Santana Row will be reopening tomorrow with a full focus on self-driving. Everything in the showroom is about Robotaxi and Cybercab with stats and information about the technology. The Cybercab on display is the production model. pic.twitter.com/yIUYdOGFOp
— Shaun Cassidy (@Starscream_SJC) July 20, 2026
Along the display, Tesla wrote this message about Cybercab:
“Cybercab is built for autonomy. It has no steering wheel, no side mirrors, and no pedals. It goes where you tell it to go and how you want it to, so you can relax along the way. It is hyper aware and responsive to your surroundings, monitoring other drivers, responding to emergency vehicles, utilizing its expertise in the rarest scenarios to help keep you safe.”
Tesla has been teasing a potential Starlink integration for quite some time now. In December, the company hinted at potential Starlink internet terminal integration within its vehicles in a patent that described a vehicle roof assembly with integrated radio frequency (RF) transparency.
The company wrote in its patent application that a new roof design built with materials that differ from the standard metallic or glass elements used in today’s cars would allow it to integrate modern vehicular technologies, in particular, ones that require radio frequency transmission and reception.
Tesla suggested high-strength polymer blends, like Polycarbonate, Acrylonitrile Butadiene Styrene, or Acrylonitrile Styrene Acrylate.
This is the first time we’ve seen Tesla officially confirm the Starlink integration into the Cybercab. It’s not much of a surprise considering the company’s intention behind the Cybercab, which is to make travel autonomous.
Productivity will now be at a maximum during a work-related commute, while the center screen could be utilized for Netflix or potentially even live TV for those who are heading to dinner or to a fun activity.

Tesla’s AI Chief just hinted at something big for FSD v14 lite owners

Elon Musk sends first warning to SpaceX short sellers






