Lifestyle
Hyperloop Competition Receives a Big Lift from SpaceX

If you did a timeline of all the major Elon Musk announcements in the last five years, it would have a lot circles on the X axis. One circle would include the Hyperloop white paper.
Musk “dropped” off the concept to the world back in 2013 and moved on. However, last year Musk and SpaceX introduced a Hyperloop pod competition for college students to take place at SpaceX’s test track in August 2016.
Most Elon Musk devotees probably know a bit about the Hyperloop white paper released in 2013 and how this “fifth mode” of transport offers a low-cost solution versus high-speed rail proposals floating around the U.S.
The Hyperloop concept from Musk involves a low-pressurized air tube structure — say from San Francisco to LA — and propels passengers in a “pod” compartment at speeds of more than 700+ mph. The pod shoots through this low-pressure tube with induction motors intermittently placed in the track that moves the compartment. These motors “would provide a reboost roughly every 70 miles,” according to the paper.
After seeing SpaceX land a rocket on a tiny barge in the ocean, this doesn’t seem so far-fetched. Companies like Hyperloop Technologies and Hyperloop Transportation Technologies are currently working on proof-of-concepts and test tracks.
In January 2016, SpaceX held the Hyperloop Pod design competition at Texas A&M and evaluated more than 124 concepts, which included best overall concept and innovation. Thirty plus university teams were picked to move on to competition weekend at SpaceX’s Hawthorne facility, where a mile long test track — six foot in diameter steel tube — is being built.
The MIT Hyperloop team won the best Overall Design Award while the Pod Innovation Award went to the Delft Univ. of Technology in the Netherlands. The event also awarded BadgerLoop, from the Univ. of Wisconsin, with the 3rd place and the Pod Technical Excellence award.
 -
-

BadgerLoop’s pod will reach speeds of up to 200+ mph in a matter of 15 seconds with a run lasting approximately 43 seconds.
Being based in Chicago, I reached out to the BadgerLoop team in March and interviewed multiple members of the team, including a Co-President, the Electrical and Controls Manager and, of course with Hyperloop, the team’s Levitation Lead.
Teslarati: So how many students are on the BadgerLoop team?
David Van Veen, Operations Director: We have a 150 dedicated members helping in all aspects related to the competition and have about 75 student engineers working on the pod project.
Brett Sjostrom, Co-President: We have something special with this team, we’ve been engineering students for three or four years and BadgerLoop is going up against teams with much more experience. The MIT Hyperloop team is made up of graduate students and some of those folks interned at NASA, SpaceX and Boeing.
The aluminum sub track in Hawthorne will be flat and this allows the BadgerLoop team to move past the air bearings concept from Musk’s white paper. BadgerLoop is implementing a Halbach Arrays concept.
Sjostrom: Halbach arrays are a certain configuration of magnets that amplify the magnetic field on one side, and negate it on the other side of the array. Passing this array over the aluminum sub track creates eddy currents which give our pod its levitation.
Teslarati: How does your Hypeloop pod differ from other teams?
Van Veen: Other teams are using passive Halbach arrays which provide just vertical levitation but there’s no forward propulsion to it.
-
Bill Carpenter, Levitation Lead: Our design creates drag from the levitation but by spinning the wheels — using drag — in the opposite direction, we can create thrust to move the pod forward. Our pod has a total of ten Halbach Array wheels, four in the front and back, and two in the middle.
So, it’s negating our drag and providing a truly frictionless ride. It’s also providing that contactless stability in all directions. Plus, it’s an active system so we can control it, speed it up or slow it down.

Here’s an example of BadgerLoop’s Halbach arrays on a wheel. The configuration of magnets amplifies the magnetic field on one side, and negate it on the other side of the array. Passing this array over the aluminum sub track creates eddy currents, which produces the pod’s levitation.
Obviously, stability is important with a $150 million test track located next to the company’s headquarters. Most of SpaceX competition specifications for a test run involve many safety hurdles to actually get on the track in August.
According to Badgerloop, these pods will reach speeds of up to 200+ mph in a matter of 15 seconds with a run lasting approximately 43 seconds. That’s why BadgerLoop’s pod will have more than 140 sensors on board for real-time safety data and avoid overheating motors and other components.
Teslarati: Can you provide an overview of your pod controls and sensors?
Eric Amikam, Electrical Team Lead: Our pod will have 114 sensors. These include proximity sensors for between the pod and the rail, acceleration and gyroscopic data. We’re also taking in almost 50 different temperature points that create a full, live thermal heat map of our pod.
Teslarati: Why so much thermal sensing?
Eric Amikam: We’re in a vacuum and don’t have the benefit of convective heating like you normally do, so we have to make sure that everything is very thermally regulated. We have a variety of thermistors placed all throughout the pod and it goes to one central location. We can look at our dashboards in the middle of a run.
-
If one of our motors is getting dangerously hot and we don’t want to break that motor, we can just shut it off remotely.
Eric Amikam: In a couple months here, we will have a full simulation from dynamic model via CANalyzer from Vector — Tesla Motors uses the using the same software. The simulation allows us to infer “over the course of these 42 seconds, here’s what all of the sensors should see.” Then, we’ll fake all that data in our CAN bus, at the hardware level, and see how the system reacts. From there, and we can fine tune it, debug, test out our fault codes and start up sequences.
Sort of a Big Deal (Not Ron Burgundy)
Of course, meeting the International Man of Action, Elon Musk, was a bonus for Co-President Sjostrom and Tieler Callazo during the Design competition at Texas A&M.
“The lead SpaceX Hyperloop engineer appears on stage and says there’s been a recent hashtag on Twitter about where’s Elon. And we’d like to answer that question,” says Sjostrom.

An early look at BadgerLoop’s pod at the Univ. of Wisconsin.
Then, Elon Musk walks out.
The top four teams’ presidents were able to meet with Elon Musk one-on-one and discuss their pod designs. “We were waiting for Musk to finish his conversation and all the other team presidents were just repeating, ‘We get to meet Elon Musk, this is awesome.’”
Sjostrom adds “Musk thought it was pretty impressive that the top four teams were doing magnetic levitation and the first Hyperloop would probably be a wheeled vehicle, just like a proof of concept.
BadgerLoop is building the aluminum pod as the semester winds down and hopes to start integrating the different sub-systems and apply the carbon fiber skin in May. The team is utilizing workplace Slack software to help organize and oversee 40 members on the electrical team, for example. BadgerLoop will have to rely on remote collaboration as some team members graduate in May.
-
“Regular students go to bed and we keep working,” says Van Veen. “The only issue is when do we sleep. That’s probably our biggest challenge to be honest.”
Looks like Musk is preparing the students for careers at Tesla Motors, SpaceX or Hyperloop.
* All the Hyperloop college teams are looking for funding as this is a capital intensive project. You can donate to BadgerLoop by visiting this page.

Elon Musk escalated his monthslong feud with Christopher Nolan’s The Odyssey this week, pledging that his own AI video tool will produce a competing version before the year is out. Responding to a fan-made, AI-generated clip of the ancient epic, Musk wrote on X, “Before this year ends, Grok Imagine will make a full-length movie of The Odyssey that is historically accurate and true to the art of Homer.”
In June, Musk quoted an xAI-shared trailer built entirely with Grok Imagine Video 1.5, a two-minute-plus reimagining of The Odyssey styled after a 1970s classical Hollywood epic, and predicted “full movies by the end of the year,” as Teslarati reported at the time. That trailer, built from 36 consistent shots by a single creator, was Musk’s proof of concept. This week’s pledge turns that prediction into a specific commitment, tied directly to Homer’s text rather than a generic demo.
Before this year ends, Grok Imagine will make a full-length movie of The Odyssey that is historically accurate and true to the art of Homer https://t.co/bVHzUmY9WN
— Elon Musk (@elonmusk) July 22, 2026
When a fan separately proposed that Musk fund a live-action alternative, to “give Mel Gibson $100 million to film an Odyssey adaptation with painstakingly historically accurate ships, armour, weapons, and casting, with all dialogue taken straight from the original poem and delivered in Homeric Greek,” Musk replied with two words: “I’m down.”
The Grok Imagine pledge lands as the tool’s underlying infrastructure has changed hands. Grok is no longer a standalone product, it folded into SpaceXAI after SpaceX’s acquisition of xAI closed in February, meaning the compute behind any Odyssey production traces back to the same Colossus supercomputers now bundled into SpaceX’s pitch to investors. Musk has separately said SpaceX’s own engineering data is being fed into the next major Grok training run, a two trillion parameter model he’s called the “2T run.”
Whether Grok Imagine can sustain a feature length narrative, rather than a series of impressive individual shots, remains the open question.
-
Cybertruck
Tesla Mobile App gets a new feature that wrap fans are going to love
Tesla’s Summer Update removes the USB drive step from customizing your car’s digital wrap design.
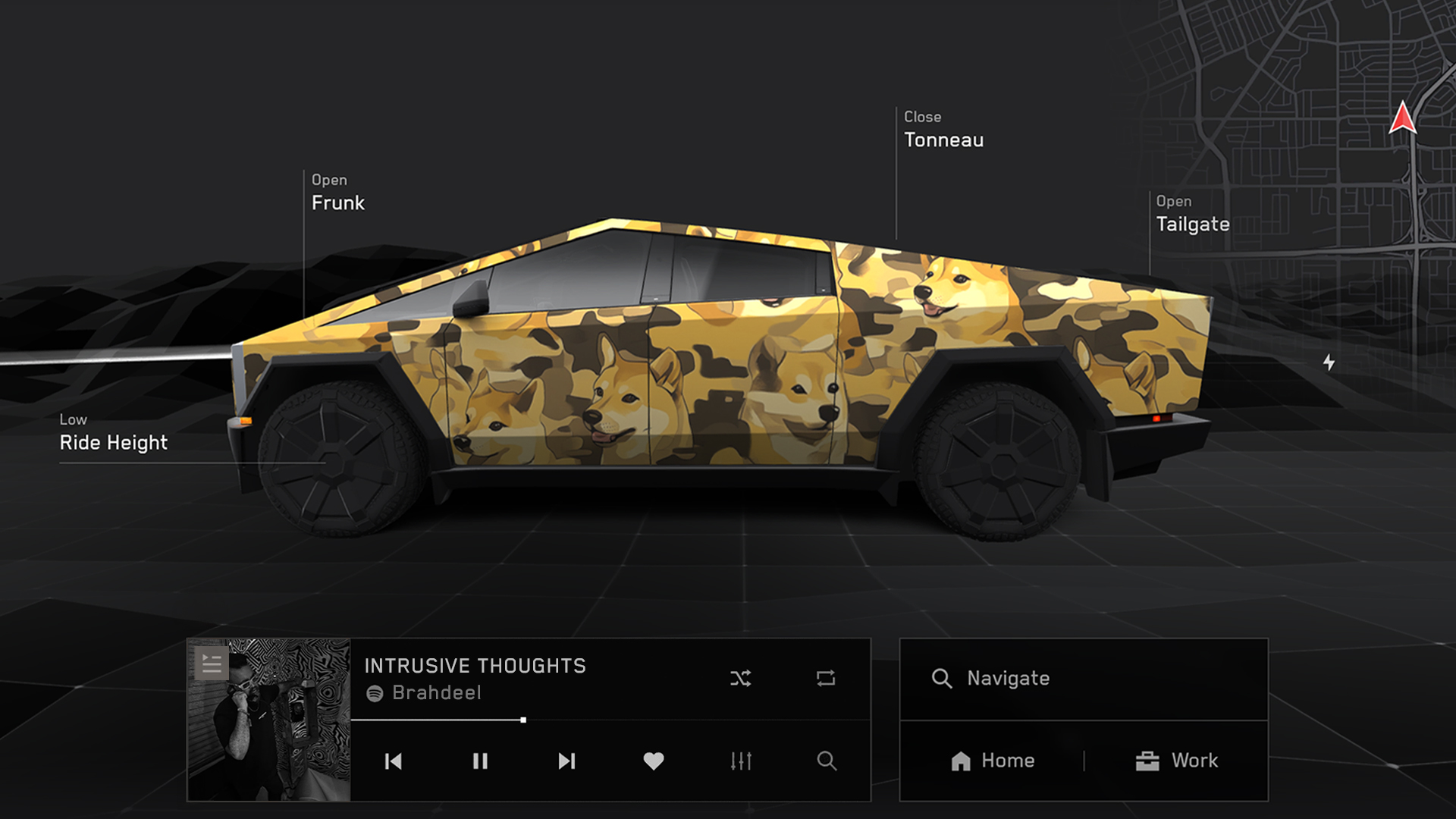
Tesla’s latest 2026 Summer Update quietly closes out one of the more tedious steps in personalizing a Tesla’s digital appearance. Uploading a custom wrap design used to require a USB drive. Now it doesn’t.
The feature is listed in Tesla’s release notes as “Send Custom Wraps from Mobile App.” The company described it plainly: “Skip the USB drive and upload a custom wrap of your car from the mobile app. Instructions for creating a custom wrap here: github.com/teslamotors/custom-wraps.”
The digital wrap tool has been around since Tesla’s 2024 Holiday Update, when it launched for Cybertruck owners first, as Teslarati reported at the time. Getting a design onto the car meant formatting a USB drive, creating a folder named exactly “Wraps,” dropping in PNG files sized between 512×512 and 1024×1024 pixels and under 1 MB each, then plugging the drive in and applying the wrap through Toybox. Tesla expanded the tool to other models and renamed it from “Colorizer” to “Paint Shop” with the 2025 Holiday Update, while also adding license plate and window tint customization alongside the wraps.
Custom wraps via mobile app https://t.co/5OydZ26g9p pic.twitter.com/uexU0ZePxu
— Tesla (@Tesla) July 22, 2026
The latest Summer Update removes the USB step from that process. Owners will be able to pull a design from wherever they saved it, whether that’s a download from social media or something built from Tesla’s own GitHub templates, and push it to the car directly through the app.
Tesla reveals 2026 Summer Update with crazy fixes to Nav and more
-
It’s a small fix relative to the rest of this latest release, which also included expanded Grok voice commands, automatic navigation that learns regular routes, and self-driving stats inside the mobile app, all detailed in our rundown of the full Summer Update. The USB requirement was one of the more common complaints about Paint Shop since it launched. Tesla did not say when the wrap upload change would reach individual vehicles, only that the broader update is rolling out now in waves.
Elon Musk
Tesla Diner is throwing a birthday party with a Franz-signed special treat
Tesla Diner turns one on July 21 with Optimus, roller skates, and a Franz-signed hat.

Tesla is throwing its Hollywood Diner a first birthday party on July 21 and the celebration comes with a guest list of unique items, including a limited run of Tesla Diner birthday hats personally signed by Tesla Chief Designer Franz von Holzhausen for the first 50 customers who place an in-car order at midnight.
One year after lines wrapped around the block on Santa Monica Boulevard for a diner that most of the restaurant industry did not take seriously, Tesla is making the case that the concept was worth the years it took to build. The concept had been in Musk’s head since at least 2018, when he floated the idea of “an old school drive-in, roller skates and rock restaurant” on X, describing it years later as “‘Grease’ meets ‘The Jetsons’ with Supercharging.”
Tesla Optimus Gen 3 is coming to the Tesla Diner with new ambitions
What made the diner genuinely different from any restaurant that came before it was not the menu or the nostalgia. It was the ordering model. Tesla owners could place food orders directly from their vehicle’s touchscreen before arriving, a small feature that hints at something much larger on the horizon. As the Cybercab and unsupervised FSD expand across major cities, the diner model becomes a template for an entirely new kind of commerce. A robotaxi pulling in to charge does not need a human to walk up to a counter. The vehicle places the order, the food is ready on arrival, and the passenger never interrupts the experience of being driven somewhere else. It is the first glimpse of what drive-through commerce looks like when the car is doing the driving.
As Teslarati has reported, Musk signaled immediately after opening that the Hollywood location was only the beginning, posting that Tesla would expand the concept to major cities worldwide and along Supercharger corridors on long-distance routes if the first location proved successful. One year in, the birthday celebration on July 21 makes a strong case that it has. Tesla announced a full day of events including a Cybercab on display, a birthday menu, Optimus in attendance, face painting, a photo booth, roller skating servers, a light show, a Skypad DJ, and complimentary collectibles.
If Musk’s ambition holds, the Hollywood diner is year one of something much bigger. The birthday party is the proof of concept. The robotaxi fleet is the business model waiting behind it.
-
Tesla Diner is turning 1 on July 21st, so we’re throwing a party
Come swing by for a day full of fun:
– Cybercab on display
– Birthday menu
– @Tesla_Optimus
– Face painting for kids & adults
– Photo booth
– Servers on roller skates delivering your order
– Light show
– Skypad DJ… pic.twitter.com/TD8pOjihYs— Tesla North America (@tesla_na) July 18, 2026

Tesla Full Self-Driving v14.3.6 review: a rare regression, but some bright spots

Musk’s massive Terafab project will get final location soon





