

News
SpaceX’s Starship rocket just took a big leap towards orbit with latest test success
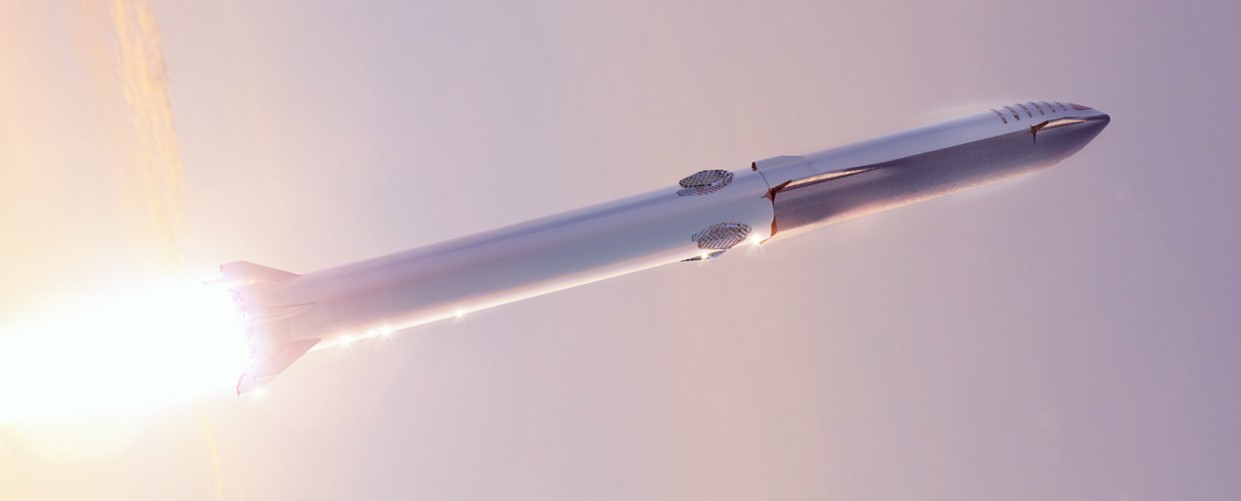
A full-scale Starship rocket has passed a critical test for the first time ever, strongly suggesting that the next-generation launch vehicle could be much closer to orbital readiness than most would imagine.
To be clear, a huge amount of work remains before Starship can be deemed anywhere close to its first orbital flight tests, not the least of which is the fabrication and assembly of the first massive Super Heavy booster(s). However, after Starship SN4’s latest successful May 9th test, it’s hard to see any apparent showstoppers that can’t be handled with a combination of fairly routine testing and iterative progress, as well as time and money. There is certainly room for improvement throughout the program but SpaceX has effectively demonstrated that the biggest practical concerns about its approach to Starship are moot.
Captured live on May 9th and 10th by local resident and photographer Mary (bocachicagal) with the help of NASASpaceflight.com, SpaceX worked for about two days to reconfigure its fourth full-scale Starship prototype after two successful Raptor engine static fires and prepare it for a different kind of test. That work mainly involved removing said Raptor and replacing it with a hydraulic ram stand used to simulate the thrust of 1-3 engines without actually needing to perform a static fire test, further allowing SpaceX to simulate much longer engine operations than its spartan test pad could survive. Around 9pm CDT on May 9th (02:00 UTC, May 10), Starship SN4’s latest trial began.
Known as a cryogenic pressure and load test, it differed from a prior “cryo proof test” completed on April 26th, in which Starship was fully loaded with liquid nitrogen (more than twice as cold as dry ice), pressurized to a bit less than 5 bar (~70 psi), and stressed with hydraulic rams. About a week later, after installing a Raptor engine on a full-scale Starship prototype for the first time ever, Starship SN4 fired up said engine on May 5th – another historic first for the next-generation launch vehicle. 30 hours later, SpaceX performed another wet dress rehearsal (WDR) with liquid methane and oxygen and fired up Starship’s Raptor engine again.
After about 48 hours of reconfiguration, SpaceX moved on to a much more serious cryogenic test. As noted by CEO Elon Musk, the 4.9 bar the rocket previously reached was accepted as enough to perform a Raptor static fire test and possibly enough for a low-stress, low-altitude flight test to ~150m (500 ft). For orbital flight, however, Starship needs to withstand a minimum of 6 bar (~90 psi), while 8.5 bar (125 psi) is preferable to give the rocket the 1.4x safety factor optimal for human spaceflight.
This time, SpaceX – having successfully gathered data from two static fire tests and several wet dress rehearsals – was ready to risk Starship SN4 and pressurized it all the way to 7.5 bar (~110 psi). While ~12% shy of minimum human spaceflight standards, Starship SN4 successfully reached and maintained 7.5 bar while the ship stressed with hydraulic rams to simulate the thrust of three Raptor engines, all of which it survived fully intact. What 7.5 bar does offer, however, is a 1.25x safety factor – on the higher end of aerospace industry standards for uncrewed orbital spaceflight (i.e. cargo/satellite launches).
 -
-
Ready for orbit?
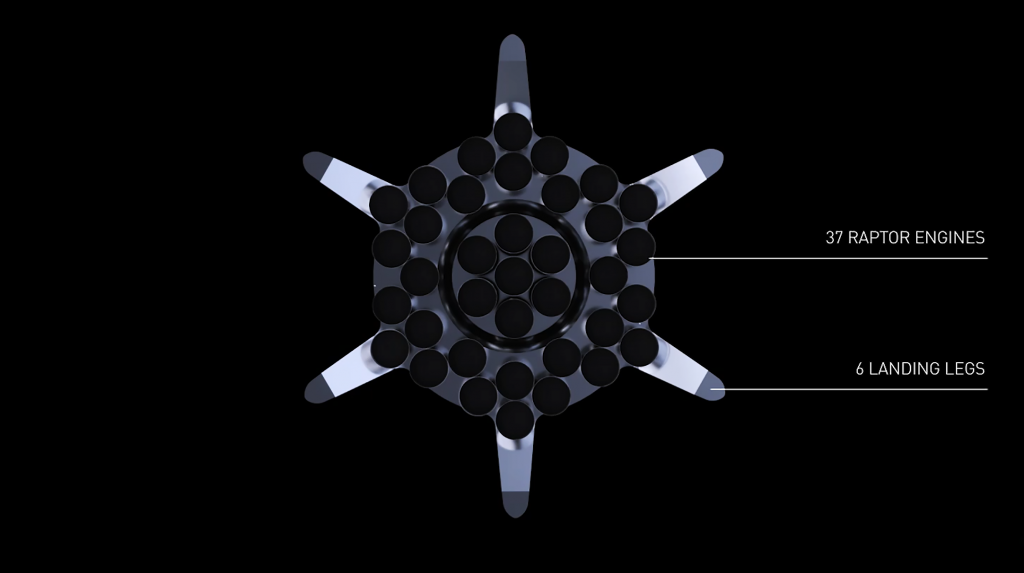
Technically, this means that – pending much additional testing and verification with different serial prototypes and (likely) higher pressures – Starship’s stainless steel structure is effectively qualified for uncrewed orbital launches. Of course, reality is much more complex. To actually perform and survive orbital flights, SpaceX will first need to build and similarly qualify the first Super Heavy boosters and ensure that those unprecedentedly large rockets can survive and sustain ~20-30 Raptor engines firing simultaneously.
Aside from Super Heavy, it’s unknown if SpaceX has begun testing Raptor engines at the durations they will need to burn to booster Starships into orbit (TBD; likely 5-10 minutes of continuous operation). Along those lines, SpaceX also needs to build, test, and qualify Raptor’s vacuum-optimized sibling to complement the sea level version’s smaller, less-efficient nozzle. Still, Musk has already revealed that RaptorVac could be a matter of weeks from its first static fire and rocket engine development – while incredibly challenging – is more of a known quantity for SpaceX.
Perhaps the most important unknown is whether SpaceX’s recent May 2020 WDRs and static fires have used autogenous pressurization, a more efficient method of pressurizing rockets by using hot gas generated by their own engines. It’s extremely likely that SpaceX has been autogenously pressurizing Starship SN4 for its recent tests, but if that weren’t the case, it would be a big source of schedule uncertainty without significant redesign work.
Ultimately, SpaceX appears to have proven that orbital-class rockets can be built cheaply out of commodified steel in extraordinarily spartan production facilities. Many, many challenges remain but the biggest uncertainty and hurdle facing SpaceX’s Starship program and ambitions is well on its way to being fully put to rest.
 -
-
Elon Musk
Space finally faced the people living next to its next Terafab mega-project
SpaceX confirmed Terafab’s Grimes County site is locked in, with construction starting within months.
SpaceX and Terafab representatives sat across from Grimes County residents for the first time on Wednesday, telling a packed Commissioners Court room that the $55 billion chip manufacturing project is now a done deal at the Gibbons Creek Reservoir site.
The meeting followed a $10 million check SpaceX sent the county earlier this week, satisfying a payment deadline built into the tax abatement agreement both sides signed in June. Elon Musk shared a post on X confirming the payment, and County Judge Joe Fauth told the San Antonio Express-News his office deposited the check after it beat its deadline.
Wednesday’s session, first reported by KBTX, moved the project from paperwork to construction. Terafab representative Riley Trennell told residents the JETI tax break agreements with Iola ISD and Anderson-Shiro CISD are signed and active, and that civil work and foundation prep are starting almost immediately. Renderings of the facility could be released within days, he said, with construction beginning within months.
The foundations for an exciting future are being built in Texas. Next up: Terafab → https://t.co/jGg52Zhn5I pic.twitter.com/SNfSXNr2tb
— SpaceX (@SpaceX) August 6, 2026
Elon Musk launches TERAFAB: The $25B Tesla-SpaceXAI chip factory that will rewire the AI industry
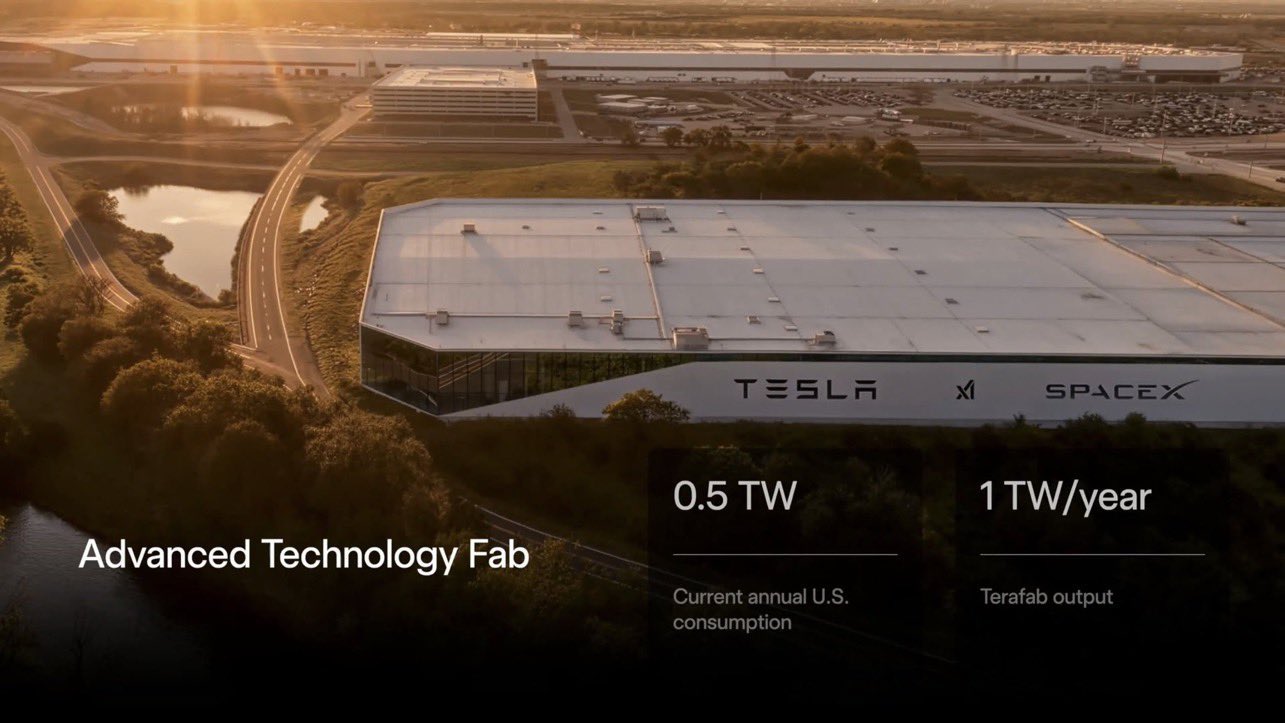
Musk first announced Terafab in March as a joint venture between Tesla, SpaceX and xAI aimed at producing over a terawatt of AI compute annually, an amount that dwarfs the roughly 20 gigawatts the entire global chip industry produces today. Intel joined as a manufacturing partner in April. Musk has said the project needed its own day in the spotlight rather than being squeezed into an earnings call, and for months the Grimes County site remained unconfirmed even as reporting pointed there.
SpaceX attorney Buck Brannon used Wednesday’s meeting to note that the company’s abatement is roughly 78 percent, not the 100 percent some earlier reports suggested. In exchange, SpaceX will pay Grimes County a fixed $20 million a year for 35 years, a total of $710 million, which Brannon said exceeds the $14 million Tesla paid Travis County in 2025.
SpaceX also addressed environmental concerns that have followed the project since Musk’s Terafab partnership with Intel was announced. Representatives said Terafab will not raise electric bills for other ratepayers, will not deplete local water supplies and will not draw down the Navasota River. SpaceX confirmed it owns the Navasota River pumping station, which it plans to use to divert stormwater into the Gibbons Creek Reservoir, and said it will build its own natural gas plants to power the facility rather than pulling from the ERCOT grid.
Grimes County commissioners also approved an addendum letting county employees use ten approved AI chatbots for work, including Grok.

Elon Musk has declared that SpaceX has effectively solved one of Starship’s most persistent engineering challenges: the reliability of its heat shield tiles.
During the company’s first-ever Earnings Call, the SpaceX CEO stated:
“I don’t want to jinx it or anything, but I think I would call the heat shield problem solved at this point. All indications from data and visual inspection is we have solved it. That doesn’t mean we won’t make improvements, but we do not see any technical obstacles to achieving rapid reusability at this point.”
Starship’s heat shield consists of roughly 18,000 hexagonal ceramic tiles covering the windward side of the upper stage. These tiles form the thermal protection system that shields the vehicle’s stainless-steel structure from the extreme heat of atmospheric reentry.
Elon says he believes the heat shield problem with Starship is currently solved.
He called it “arguably the single biggest problem” pic.twitter.com/eEE9vM5zlz
— TESLARATI (@Teslarati) August 4, 2026
During descent, atmospheric friction generates temperatures exceeding several thousand degrees Celsius and creates plasma flows capable of melting unprotected metal. The tiles absorb, radiate, and insulate against this energy, allowing the vehicle to survive and potentially fly again. Without a durable heat shield, full and rapid reusability, the cornerstone of Starship’s design for frequent launches, satellite deployments, and deep-space missions, would remain impossible.
The tiles have long been a source of difficulty. On earlier test flights, a significant number of tiles detached during ascent due to vibration, aerodynamic loads, and imperfect attachment methods using pins and adhesives. Gaps between tiles allowed hot plasma to infiltrate, causing secondary damage and hot spots on the underlying structure.
These issues echoed challenges faced by NASA’s Space Shuttle, whose ceramic tiles required extensive, labor-intensive inspections and replacements between missions, preventing rapid turnaround. SpaceX has iteratively improved materials, standardized tile shapes, refined attachment techniques, added secondary ablative layers, and tested sealing methods such as “crunch wrap” felt to close gaps.
Progress was visible across Flights 10–12, with steadily better tile retention, yet questions remained about whether the system could support the minimal-refurbishment goal of rapid reuse.
Flight 13 on July 24 provided the decisive evidence. Ship 40 flew a deliberately more demanding profile with higher dynamic pressure to stress the heat shield beyond typical operational loads. It successfully deployed 20 operational Starlink V3 satellites, the first such payload on a Starship mission, performed an in-space Raptor engine relight, and executed a controlled reentry.
Elon Musk sheds two new bits of detail on Starship after 13th test launch
Cameras on six of the satellites and onboard sensors captured extensive imagery and data of the shield throughout the flight. The ship then achieved its softest splashdown to date in the Indian Ocean, remaining intact and floating rather than breaking apart or exploding as on prior missions. This allowed drone inspections and continuous telemetry of the heat shield in near-real time.
Post-flight analysis showed the majority of tiles remaining attached with only minor damage and limited plasma streaking at seams. Musk noted that the mission delivered “all the heat shield data we needed and then some.” Combined with visual inspections, these results underpinned his subsequent assessment that the core technical barriers to rapid reusability have been cleared. While refinements will continue, Flight 13 marked a pivotal step toward Starship’s operational future.

SpaceX COO Gwynne Shotwell outlined ambitious plans for Starlink Mobile during the company’s August 4 Earnings call, signaling a direct challenge to U.S. wireless giants like AT&T, T-Mobile, and Verizon.
Shotwell noted that the three companies generate roughly $600 billion in combined annual revenue. “I anticipate us to be able to acquire quite a few of their customers because I think our service will be better,” she said. “We will eliminate dead zones leveraging the satellites in orbit. It will be better during any natural disaster… I’m quite excited about Starlink Mobile.”
SpaceX President & COO Gwynne Shotwell on @Starlink Mobile and its impact on Verizon, AT&T and T-Mobile:
“Roughly, between them, $600 billion a year. I anticipate us to be able to acquire quite a few of their customers. Our service will be better. We will eliminate dead zones… pic.twitter.com/UYZUkrGc0L
— Sawyer Merritt (@SawyerMerritt) August 4, 2026
SpaceX intends to combine its satellite constellation with terrestrial infrastructure. The company has acquired about 65 MHz of spectrum from EchoStar and plans to deploy next-generation Starlink Mobile satellites in 2027, with upgraded service targeted for the end of that year.
Shotwell described the enhanced network, leveraging more satellites and spectrum, as potentially “100 times better” than the current direct-to-cell offering, which already supports basic texting and app-based voice/video in coverage gaps through partnerships. She also indicated plans for low-cost cellular base stations that could integrate with existing Starlink dishes, creating a hybrid system for broader capacity in urban, suburban, and rural areas.
For the general public, Starlink Mobile promises significant advantages. Satellite connectivity can fill gaps where traditional cell towers fail, delivering service in remote locations, mountains, or during outages caused by storms, wildfires, or infrastructure damage—conditions in which ground networks often collapse.
Users could enjoy more consistent coverage without relying solely on dense tower builds, potentially at competitive prices as SpaceX scales. The hybrid approach aims to support full mobile services, including higher-speed data, while working with unmodified smartphones over time.
These developments revive long-standing but unfounded rumors of a Musk-developed “Tesla phone.” Speculative claims of a “Pi Phone” or similar device with built-in Starlink connectivity have circulated for years on social media, often featuring fabricated images and details. Elon Musk has repeatedly denied any such plans, stating Tesla has no intention of entering the smartphone market unless forced by extreme circumstances with app stores.
No official product, filings, or development announcements have ever materialized; the rumors remain hoaxes.
The announcement quickly pressured telecom stocks. Shares of AT&T, Verizon, and T-Mobile fell between roughly 2 and 4 percent in after-hours and premarket trading as investors weighed the competitive threat from a hybrid satellite-terrestrial network.
While execution challenges remain—spectrum deployment, infrastructure rollout, and regulatory hurdles—Shotwell’s remarks mark SpaceX’s clearest signal yet of entering the consumer mobile market as a full competitor.

Space finally faced the people living next to its next Terafab mega-project

SpaceX has solved Starship’s biggest challenge, Elon Musk says





