
News
SpaceX’s Crew Dragon spaceship marches towards launch with vacuum chamber test
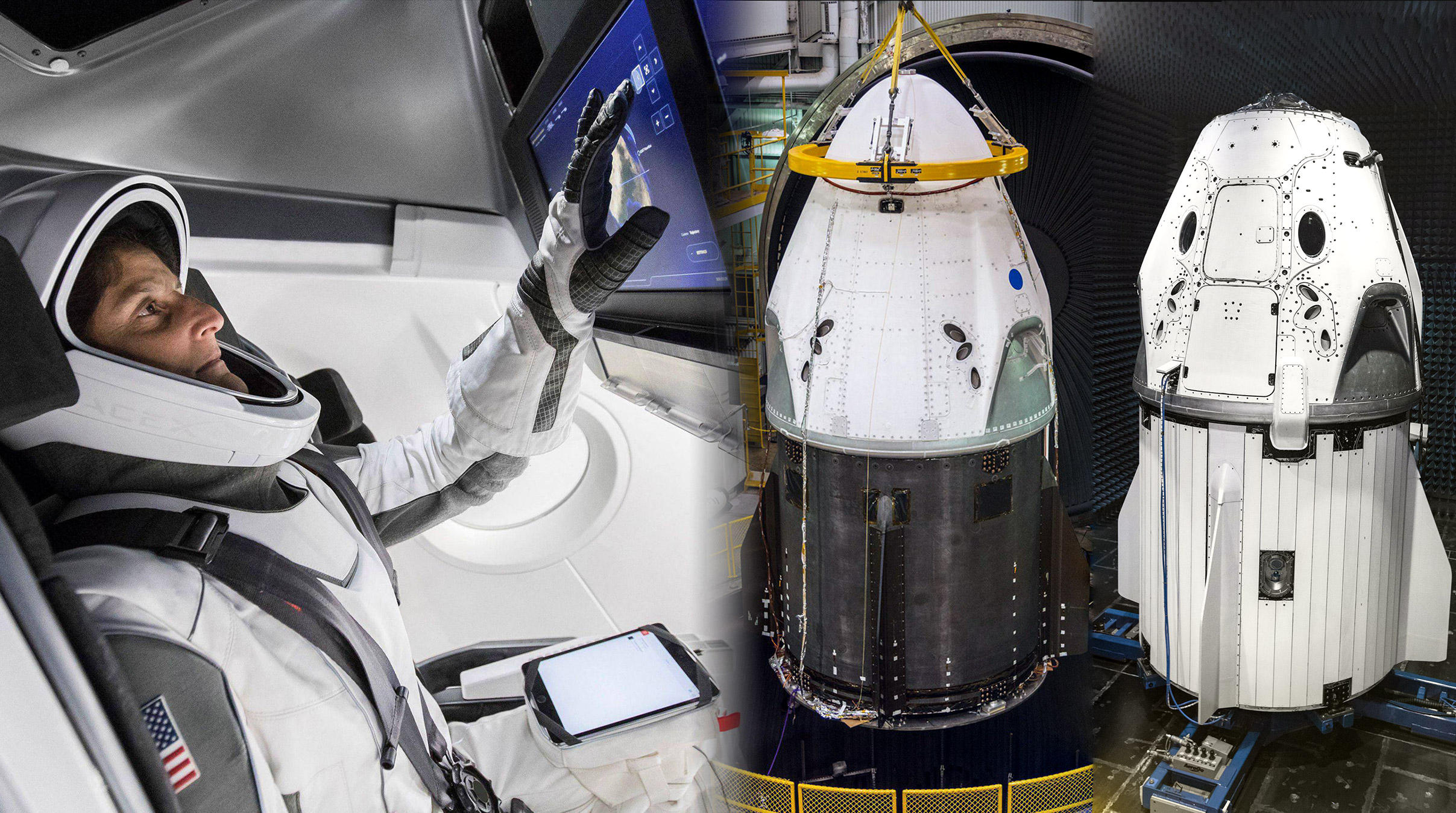
SpaceX has published the latest photo of its next-generation Crew Dragon spacecraft, showing the crewed vehicle preparing to be put through its paces inside a NASA thermal vacuum chamber located in Cleveland, Ohio. If the tests are completed without issue, the Dragon’s next destination will be Cape Canaveral, Florida, where it will prepare for an inaugural launch targeted for the fourth quarter of 2018.
In the photo released on June 20th, SpaceX’s DM-1 Crew Dragon capsule (C202 in shorthand: [C]apsule, Dragon [2], serial number [02]) is seen being craned by SpaceX technicians into the thermal vacuum chamber at NASA’s Plum Brook testing facilities. Located in Ohio, Plum Brook’s vacuum chamber is unique because of both its size and its ability to fairly accurate replicate the actual environment faced by satellites and spacecraft once in space. Most importantly, this includes the extreme thermal conditions those vehicles are subjected to by constant ~90-minute day-night cycles in low Earth orbit (LEO).
Without Earth’s cozy atmosphere to act as both a heat sink and insulating blanket once on orbit, there is simply nothing there to protect spacecraft like Crew Dragon from the absolute extremes of direct solar radiation (sunlight), total darkness, and a complete lack of cooling by conduction and convection. In order to avoid overheating, Crew Dragon thus needs to bring along its own means of cooling in the form of onboard radiators to shed excess heat. The use of white paint on spacecraft further aids this process by selectively preventing the absorption of solar radiation while simultaneously efficiently emitting in infrared wavelengths.
-

- SpaceX’s Demo Mission-1 Crew Dragon seen preparing for vacuum tests at a NASA-run facility, June 2018. (SpaceX)
-

- The DM-1 Crew Dragon testing inside SpaceX’s anechoic chamber, May 2018. (SpaceX)
-
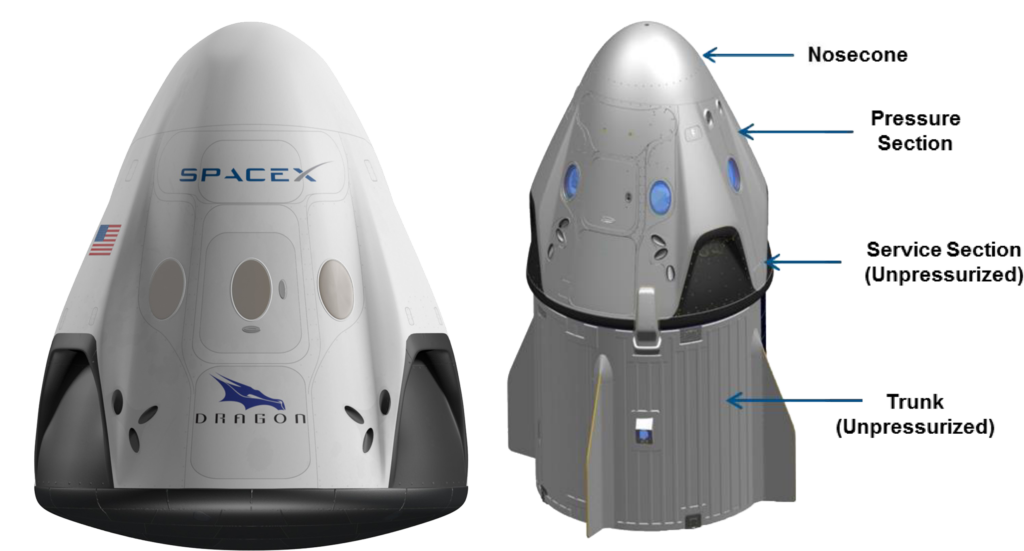
- An overview of Crew Dragon’s main features, all of which can be seen in the real-life photos. The Cargo Dragon version will likely remove seats and windows. (SpaceX)
How to prep your Dragon
Crew Dragon’s primary radiators are elegantly integrated into vertical panels installed on the cylindrical bottom segment, known as the trunk, while the craft’s power source – solar panels in this case – are installed in a curved array on the opposite side of the trunk. Intriguingly, the trunks displayed in the two most recent photos of the DM-1 Crew Dragon appear to be almost completely different, and the trunk at Plum Brook does not appear to have its solar arrays or radiators installed. Nominally, SpaceX would use the thermal vacuum capabilities of the Ohio facility to fully vet Crew Dragon’s ability to maintain optimal temperatures on orbit, but the particularly tests planned for the DM-1 capsule and trunk may be of a slightly different type.
-

- On February 28, SpaceX completed a demonstration of their ability to recover the crew and capsule after a nominal water splashdown in the Atlantic Ocean, just off the coast of Florida. (SpaceX)
-

- Astronaut Bob Behnken examines a sample of Crew Dragon docking and crew transfer hardware, the mechanisms that will allow the spacecraft to dock with the International Space Station and allow crew to enter the orbital outpost. Taken March 2017. (SpaceX)
Regardless, after testing at Plum Brook is completed, the DM-1 Crew Dragon capsule will be shipped to a newly-constructed processing facility in Cape Canaveral, Florida, while it’s understood that the trunk installed in SpaceX’s June 20th photo will be returned to the Hawthorne, CA factory to be outfitted with flight hardware (presumably including cameras, radiators, solar arrays, and a healthy amount of insulation). It’s unclear when the two segments of DM-1 will part ways and head on to their next destinations, but it’s likely that testing at Plum Brook will last for at least a handful of weeks.
Birds of a feather
In the meantime, several additional Crew Dragon capsules/trunks and the Falcon 9 Block 5 rockets that will launch them are in a variety of states of fabrication and assembly at SpaceX’s Hawthorne factory. B1051, the Block 5 booster assigned to the first uncrewed Demo-1 launch of Crew Dragon, was reported by NASA to be undergoing propellant tank integration in March 2018, implying that the rocket should be at or near the final stages of integration, and will likely ship to McGregor, Texas for static fire testing late this summer.
As of June 15th, SpaceX’s third Falcon 9 Block 5 booster was vertical on the Texas test stand, likely nearing its own static fire test before being shipped to SpaceX’s Vandenberg Air Force Base launch facilities for the July 20th launch of Iridium-7. While possible that a booster slipped past the watchful eyes and ears of SpaceX enthusiast observers, it’s probable that the rocket currently in McGregor is B1048, implying that a minimum of two additional booster shipments and Texas test programs remain before B1051 can be prepped to launch SpaceX’s first Crew Dragon mission. At the current marginally accelerated booster production and shipment schedule (~ 30-day cadence), B1051 would be expected to leave Hawthorne for Texas no earlier than (NET) late August or early September. This meshes with a recent comment from Commercial Crew astronaut Suni Williams:
 -
-
“I think we’re going to get the [uncrewed[ demo flights probably by the end of the year, maybe a little after that . . . and then the crew demo missions next year.”
-

- Falcon 9 Block 5 completed its first launch on May 11, carrying the Bangabandhu-1 communications satellite to geostationary transfer orbit. (Tom Cross)
-

- SpaceX’s second Block 5 booster was spotted vertical at the company’s McGregor, TX testing facilities. That booster has since been shipped to Florida for a mid-July launch, with B1048 now in its place as of June 15. (Aero Photo)
-

- A matte-silver Block 5 Merlin 1D rocket engine seen preparing to leave SpaceX’s Hawthorne factory for testing in Texas. (SpaceX)
Anticipating acceptance and prelaunch testing that is far more extensive and time-consuming than typically seen with SpaceX’s commercial missions, it’s safe to bet that the first uncrewed Crew Dragon mission – DM-1 – will launch from Kennedy Space Center in November or December 2018. While those operations proceed over the course of the rest of this year, SpaceX expects roughly 10 additional Falcon 9 and Falcon Heavy launches to occur. It’s gonna be a busy H2.
Follow us for live updates, peeks behind the scenes, and photos from Teslarati’s East and West Coast photographers.
Teslarati – Instagram – Twitter
Tom Cross – Twitter
Pauline Acalin – Twitter
Eric Ralph – Twitter
-


Tesla has continued to flex the strength, rigidity, and robustness of its all-electric pickup, the Cybertruck. In fact, since 2019, Cybertruck’s ability to avoid dents, dings, and even gunfire has been one of the main selling points Tesla has used to attract buyers who are looking for a vehicle that can handle the most intense challenges.
But that does not mean Tesla is not still actively trying to make it even better.
In a new hardware update, Tesla has decided to change the material of the Cybertruck’s underbody panels from aluminum to carbon fiber, a move that aims to not only increase pricing efficiency but also improve strength.
RELATED:
Cybertruck Lead Engineer Wes Morrill confirmed the change was made to the Cybertruck recently after it was spotted by Coleton Guerin of Out of Spec. This particular trim level was a Cyberbeast, but it is being applied to all trims to keep supply chain efficiency high and have less variance across trim levels.
Morrill said that Tesla tested different materials for the underbody panel protection, and carbon fiber performed better than aluminum, which is what the company was using since its first deliveries in 2023.
-
Additionally, there are some efficiency improvements because Tesla can better form the areas around the bolts to keep underbody airflow cleaner than previously.
good eye – it’s a new material. Testing showed it to be more durable than the aluminum while being lower weight and cost. Also slight efficiency improvement since we can better form the areas around the bolts to keep the underbody airflow cleaner than what stamped aluminum allows
— Wes (@wmorrill3) July 30, 2026
Carbon fiber is traditionally lighter and more durable than aluminum, which is why it is such a popular material among luxury automakers, and EV makers will utilize some of the materials around battery packs to save weight.
This is the first instance of Tesla utilizing carbon fiber on the Cybertruck’s exterior to help with overall performance and strength. As previously mentioned, Tesla used aluminum to protect the underside of the body, but it is pretty typical for the company to continue making engineering changes that will improve the car in the future.

Tesla released Full Self-Driving version 14.3.7 yesterday, and after about 90 miles of testing today, it is evident there are some definite fixes from version 14.3.6, which I wrote about last week and called a regression.
Within the first 40 minutes of my drive on v14.3.7, it saved me from getting into an accident with an unaware Dodge Charger driver, and some of the things Tesla seemed to miss in v14.3.6 were definitely improved. All in all, the release so far has some really great performance, and I’m looking forward to testing it further.
For now, here’s everything I noticed with v14.3.7:
Overall Improvement
Just generally speaking from a ride perspective, this was a really great experience. A lot of the hesitancy I experienced on v14.3.6 was gone. There were no instances of brake-stabbing, wheel-jerking, or any uncertain or unconfident movements. It was void of anything that I felt made it timid with v14.3.6.
The one thing I do hope to see down the road is a smaller need to adjust Speed Profiles so often. Because Tesla calls FSD “Supervised,” I’m okay with needing to hit the scroll wheel a few times a drive.
However, I hope that things can be incrementally improved upon with speed. Sometimes it’s too fast; other times it’s too slow. It’s a difficult thing to hone in and refine, but I hope it eventually gets there.
I didn’t notice any significant left lane camping or any behaviors that were completely out of line. I am hopeful that this opinion does not change, but after driving a few days with this version and putting it in a variety of different situations, you are exposed to more behaviors, some of which are not necessarily what I’d prefer.
-
The big things to notice, at least in my experience thus far, are that the major issues with previous versions — meaning the braking stabbing and wheel jerking — simply weren’t there. That’s enough to already consider this progress compared to .6.
Manual Signal Override is More Responsive
On .6, I had quite a few issues with FSD ignoring my manually input turn signals. If Tesla wants to call it “Supervised,” then the car should not ignore any input the driver gives. If I touch the accelerator on FSD, the car speeds up.
🚨 Tesla FSD v14.3.7 obeying manual turn signals https://t.co/6eqToXpQfC pic.twitter.com/vHBlFQ4PDV
— TESLARATI (@Teslarati) August 2, 2026
The car did a great job of obeying my turn signals when I wanted it to change lanes, which is welcome.
Parking Lot Performance
Before .6, I traditionally took over in nearly every parking lot my car entered, because I knew it would not park somewhere that I wanted, and usually, it was just a tad too timid in this setting.
The one bright spot of .6 was how well it handled parking lots. This continued with v14.3.7:
-
I’m always really happy to see progress at all, but once parking preferences come to FSD, as long as this performance is still around, that could potentially be the biggest improvement I’ve seen in FSD in the year I’ve been using it personally on a daily basis.
Full Self-Driving Averts Disaster
A Dodge Charger changed into my lane without checking if I was there, running me off the road. FSD made the initial avoidance maneuver; I grabbed the wheel out of instinct, looked in my side mirror to ensure I had nobody following closely behind, hit the brake, and straightened the car back up to avoid a curb:
🚨 Guys this is why you all NEED to stay vigilant behind the wheel, even on Tesla Full Self-Driving
Human drivers are UNHINGED and have no idea what they’re doing anymore. This was a kid obviously younger than 20 years old with zero awareness.
First drive with v14.3.7 https://t.co/1vTbCMpCn8 pic.twitter.com/lz7KKEF6bj
— TESLARATI (@Teslarati) August 2, 2026
-
There have been quite a few responses to this video stating that I should never have grabbed the wheel. To be honest, I really wish I had not done so, because I do believe FSD would have avoided any sort of collision with anything, including the car or the curb.
However, this was the first time I had ever been this close to being hit while using FSD. My natural reaction was to take over. I think if I had had something like this happen before, my reaction might have been different.
Hitting the brake avoided hitting the curb, while FSD swerved to avoid the car. My concern after the car was clear of my front end was the curb. All in all, I’m really happy with how things turned out, and I think anyone could be a critic of how I handled it. I only had a split second to really make a decision, and thankfully, any damage was avoided.
It is clear FSD managed to avoid the car coming down before I was able to. I truly credit FSD for avoiding the collision.
What Needs to Improve
Better Recognition of Potholes, Uneven Roads, Sharp Changes in Roadway/Bumps
On Friday, my Fianceè and I were in the car, and FSD was driving us. We crossed over a roadway that has a traffic light, and FSD was traveling at 40 MPH on Standard, 5 MPH over the speed limit. Everything was more than reasonable.
However, the road we were crossing at the light has a major bump both as you start and finish crossing it. Without a speed reduction, your car can go airborne. The Tesla did just this on Friday on v14.3.6; it was an uncomfortable bounce that pretty much confirmed I would not ever let FSD go over again unless we were sitting at that intersection when there is a red light.
I even tried scrolling down into Sloth quickly, but I ended up just taking over:
-
This is that big bounce that I mentioned in the quoted post.
It’s just a tad too drastic to take at the speed FSD wants to go over it. You can see me quickly swipe down into Sloth, but I intervened. https://t.co/K20PK9ysBg pic.twitter.com/81Oc82ZJcZ
— TESLARATI (@Teslarati) August 2, 2026
A few people have said it remains related to the vision-based approach and its difficulty comprehending 3D. This is a huge issue because this can cause serious damage at certain speeds.
Navigation
Nothing new here. I still turn off “Online Routing” quite frequently to get the car to take logical routes from time to time.
Auto Wipers
Auto Wipers are just plain bad. I really hope Tesla just uses a rain sensor. I thought they had improved at one point, but I still get dry wipes, Speed 4 on a drizzle, and Speed 2 on a steady rain. In reality, these should be switched.
You can watch our full review of Tesla Full Self-Driving v14.3.7 below:
-
🚨 Tesla Full Self-Driving v14.3.7 saved me from an accident! FULL REVIEW: https://t.co/1vTbCMpCn8 pic.twitter.com/9mHmKVoMVA
— TESLARATI (@Teslarati) August 2, 2026

SpaceX will report second quarter results after the market closes on Tuesday, August 4, marking the first time the company has opened its books to the public since its record IPO in June. Management will host a live audio only webcast at 4:30 p.m. ET, streamed on X, with no dial in option.
The debut carries more weight than a typical first quarter as a public company. Two trading days after the release, on August 6, the first tranche of SpaceX’s lockup expires, freeing roughly 911.5 million insider and employee shares, worth well over $100 billion at current prices and the largest such release in Wall Street history. A second, larger tranche tied to the stock trading 30 percent above its $135 IPO price never triggered, since shares have spent most of July trading below that price.
Wall Street’s models point to revenue near $6.9 billion for the quarter, up sharply from the $4.69 billion SpaceX reported in the first quarter, with a narrower per share loss than the $1.27 posted three months earlier, according to estimates compiled by Motley Fool. Those numbers will be the first look at how SpaceX’s three segments, Starlink, launch and AI, are performing independently.
SpaceX scores another massive Pentagon deal to support military satellites
Investors heading into the call have a specific list of questions. How many net new Starlink subscribers did SpaceX add after ending March with 10.3 million, and is average revenue per user holding up as the service expands into lower income markets. How much of the AI segment’s revenue reflects contract signings with Anthropic, Google and Reflection AI this year, deals that combined could annualize to nearly $28 billion if fully ramped. Whether capital expenditures, which nearly doubled in the AI segment alone between 2024 and 2025, are still accelerating or starting to plateau. And whether management offers any forward guidance at all, something SpaceX has never done publicly.
The report will also land days after Elon Musk publicly denied a Wall Street Journal report describing internal planning to separate Tesla’s China business ahead of a potential Tesla-SpaceX merger. Whether Musk or SpaceX executives address that speculation on the call, even indirectly, maybe something investors will be listening for on Tuesday.
As Teslarati reported after Musk’s own warning to short sellers last week, the CEO has made clear he expects skeptics to be proven wrong over time. Tuesday will be the first chance for the numbers themselves to make that case.
-

Tesla quietly made the Cybertruck even stronger

Tesla Full Self-Driving v14.3.7 early review: FSD saved me from an accident





