Firmware
How Does Autopilot React to Disappearing Lane Markings?


Autopilot has now been live for over a month. Some 40,000 Autopilot-enabled Teslas are currently on the road and combine for roughly a million miles of driving per day. I don’t believe it was clarified if those miles were Autopilot or in total but If we assume that just 10% of those miles are spent using Autopilot, Tesla would have already gathered data from 3,000,000 miles of driving. Fleet learning, the concept that when one car learns something the whole fleet learns something, is one of the many things that makes Tesla’s model of incremental improvements so revolutionary. Changes can be made quickly and the software can be refined using data that would be otherwise impossible to collect. They are even creating incredibly detailed maps using the data collected from these cars.
All of this is good news for many reasons, not the least of which is this: roads are not perfect. Whether the road is just old with faded markings or in the midst of being refreshed via construction, lanes are not always consistent, nor are they always clear. Even where they are perfect, it wouldn’t take long for a car driving at highway speeds to reach a stretch of road where that is no longer the case and the lane marking disappear.
So what happens when Autopilot experiences disappearing lane markings?
Here is how the manual describes perfect operation.
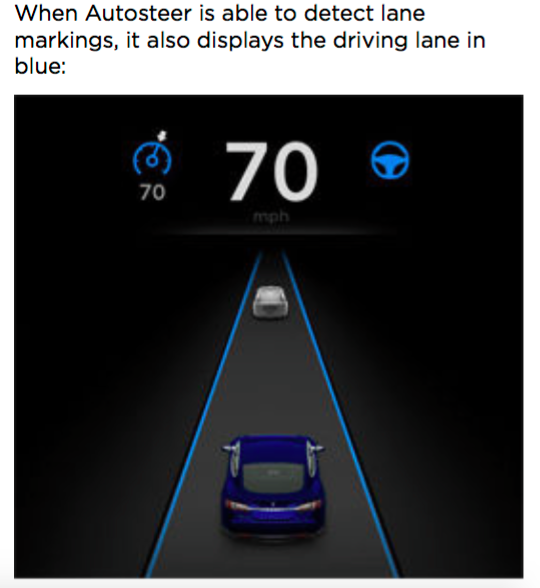
Autosteer builds upon Traffic-Aware Cruise Control, intelligently keeping Model S in its driving lane when cruising at a set speed. Using the forward looking camera, the radar sensor, and the ultrasonic sensors, Autosteer detects lane markings and the presence of vehicles and objects, steering Model S based on the lane markings and the vehicle directly in front of you.
Note: In most cases, Autosteer attempts to center Model S in the driving lane. However, if the sensors detect the presence an obstacle (such as a vehicle or guard rail), Autosteer may steer Model S in a driving path that is offset from the center of the lane.
What it doesn’t describe is what happens when one of the lane markings disappears while Autosteer is engaged. In my experiences, the car does an excellent job of tracking the vehicle directly in front of it. That is one way the Tesla keeps an appropriate driving path. We also know from the owners manual excerpt above that the car also uses the camera, among other hardware components to keep in the lane. In a system this complex, redundancies are necessary.
When one lane is no longer visible to the forward looking camera, the car will favor the other side. This assumes it sees no obstacles preventing that behavior. This may also be the reason I’ve experienced the car taking (or trying to take) an exit when the lane of travel widens and splits. I am hopeful that inadvertent exit taking is one of the things fleet learning and map data will help to eliminate over time. In fact, today I used Autopilot on a highway I don’t often take and on two occasions assumed the car would attempt to follow the exit but was pleasantly surprised when it did not.
![Tesla Autopilot Version 7.0 Dashboard Display [Source: Tesla Motors]](http://www.teslarati.com/wp-content/uploads/2015/10/Tesla-Version-7-Autopilot-Dash.jpg)
Tesla Autopilot Version 7.0 Dashboard Display [Source: Tesla Motors]
Just as quickly as a clear lane marking can become unclear, the Tesla will sense and act. Drivers should regularly check the center dash screen to understand the status of Autopilot. The act of monitoring the data that is presented on the screen and mentally process that information helps a driver to better understand how the system works. As a result, a driver learns how to work the system. Watching how the car physically reacts to things such as an unclear lane markings also makes drivers more confident in the system’s abilities. Limitations and situations when it is appropriate to take over will become apparent and all combined, lead to responsible and successful trips. We learn from it while it learns from us.
In the video below, I show you exactly what it looks like when the car loses sight of a lane and corrects itself to maintain a safe driving path. Please excuse the quality of the video. Bright sun made seeing the display screen challenging, and I manually held the camera in an attempt to show both the screen and the road ahead, while not showing the driver’s shoulder.
More Autopilot News
- Tesla Autopilot is the perfect traffic companion
- What happens when you ignore the Tesla Autopilot warnings?
- Will Autopilot have an ethical component built in?
- Watch Tesla Autopark react to 3 parking challenges










It appears that Tesla may be preparing to roll out some subscription-based services soon. Based on the observations of a Wales-based Model 3 owner who performed some reverse-engineering on the Tesla mobile app, it seems that the electric car maker has added a new “Subscribe” option beside the “Buy” option within the “Upgrades” tab, at least behind the scenes.
A screenshot of the new option was posted in the r/TeslaMotors subreddit, and while the Tesla owner in question, u/Callump01, admitted that the screenshot looks like something that could be easily fabricated, he did submit proof of his reverse-engineering to the community’s moderators. The moderators of the r/TeslaMotors subreddit confirmed the legitimacy of the Model 3 owner’s work, further suggesting that subscription options may indeed be coming to Tesla owners soon.
Did some reverse engineering on the app and Tesla looks to be preparing for subscriptions? from r/teslamotors
Tesla’s Full Self-Driving suite has been heavily speculated to be offered as a subscription option, similar to the company’s Premium Connectivity feature. And back in April, noted Tesla hacker @greentheonly stated that the company’s vehicles already had the source codes for a pay-as-you-go subscription model. The Tesla hacker suggested then that Tesla would likely release such a feature by the end of the year — something that Elon Musk also suggested in the first-quarter earnings call. “I think we will offer Full Self-Driving as a subscription service, but it will be probably towards the end of this year,” Musk stated.
While the signs for an upcoming FSD subscription option seem to be getting more and more prominent as the year approaches its final quarter, the details for such a feature are still quite slim. Pricing for FSD subscriptions, for example, have not been teased by Elon Musk yet, though he has stated on Twitter that purchasing the suite upfront would be more worth it in the long term. References to the feature in the vehicles’ source code, and now in the Tesla mobile app, also listed no references to pricing.
The idea of FSD subscriptions could prove quite popular among electric car owners, especially since it would allow budget-conscious customers to make the most out of the company’s driver-assist and self-driving systems without committing to the features’ full price. The current price of the Full Self-Driving suite is no joke, after all, being listed at $8,000 on top of a vehicle’s cost. By offering subscriptions to features like Navigate on Autopilot with automatic lane changes, owners could gain access to advanced functions only as they are needed.
Elon Musk, for his part, has explained that ultimately, he still believes that purchasing the Full Self-Driving suite outright provides the most value to customers, as it is an investment that would pay off in the future. “I should say, it will still make sense to buy FSD as an option as in our view, buying FSD is an investment in the future. And we are confident that it is an investment that will pay off to the consumer – to the benefit of the consumer.” Musk said.
Tesla has started rolling out update 2020.36 this weekend, introducing a couple of notable new features for its vehicles. While there are only a few handful of vehicles that have reportedly received the update so far, 2020.36 makes it evident that the electric car maker has made some strides in its efforts to refine its driver-assist systems for inner-city driving.
Tesla is currently hard at work developing key features for its Full Self-Driving suite, which should allow vehicles to navigate through inner-city streets without driver input. Tesla’s FSD suite is still a work in progress, though the company has released the initial iterations of key features such Traffic Light and Stop Sign Control, which was introduced last April. Similar to the first release of Navigate on Autopilot, however, the capabilities of Traffic Light and Stop Sign Control were pretty basic during their initial rollout.
2020.36 Showing Speed Limit Signs in Visualization from r/teslamotors
With the release of update 2020.36, Tesla has rolled out some improvements that should allow its vehicles to handle traffic lights better. What’s more, the update also includes a particularly useful feature that enables better recognition of speed limit signs, which should make Autopilot’s speed adjustments better during use. Following are the Release Notes for these two new features.
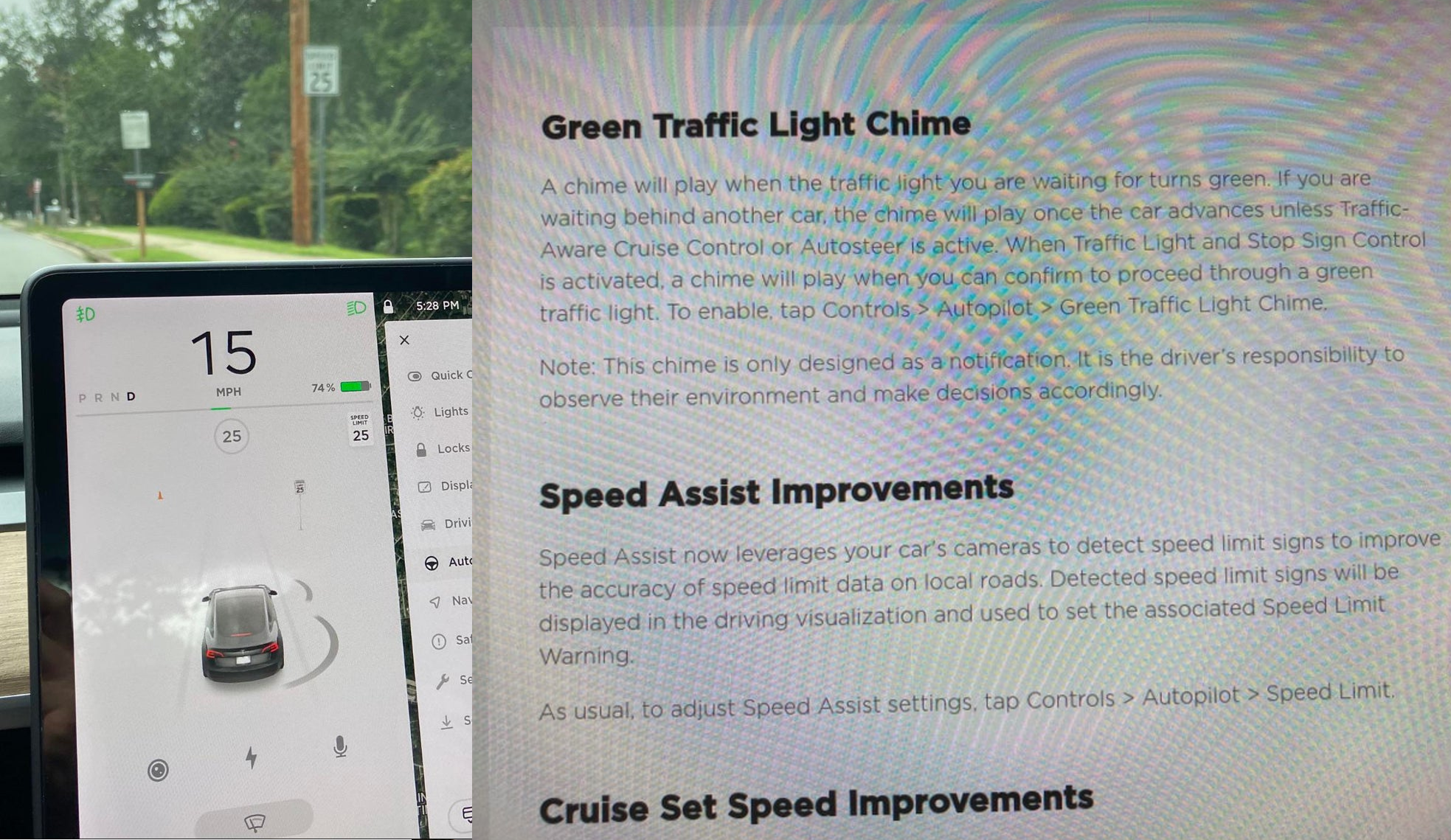
Green Traffic Light Chime
“A chime will play when the traffic light you are waiting for turns green. If you are waiting behind another car, the chime will play once the car advances unless Traffic-Aware Cruise Control or Autosteer is active. When Traffic Light and Stop Sign Control is activated, a chime will play when you can confirm to proceed through a green traffic light. To enable, tap Controls > Autopilot > Green Traffic Light Chime.
“Note: This chime is only designed as a notification. It is the driver’s responsibility to observe their environment and make decisions accordingly.”
Speed Assist Improvements
“Speed Assist now leverages your car’s cameras to detect speed limit signs to improve the accuracy of speed limit data on local roads. Detected speed limit signs will be displayed in the driving visualization and used to set the associated Speed Limit Warning.
“As usual, to adjust Speed Assist settings, tap Controls > Autopilot > Speed Limit.”
Footage of the new green light chime in action via @NASA8500 on Twitter ✈️ from r/teslamotors
Amidst the rollout of 2020.36’s new features, speculations were abounding among Tesla community members that this update may include the first pieces of the company’s highly-anticipated Autopilot rewrite. Inasmuch as the idea is exciting, however, Tesla CEO Elon Musk has stated that this was not the case. While responding to a Tesla owner who asked if the Autopilot rewrite is in “shadow mode” in 2020.36, Musk responded “Not yet.”

Tesla has rolled out a free three-month trial subscription to Sirius XM, in what appears to be the company’s latest push into making its vehicles’ entertainment systems more feature-rich. The new Sirius XM offer will likely be appreciated by owners of the company’s vehicles, especially considering that the service is among the most popular satellite radios in the country today.
Tesla announced its new offer in an email sent on Monday. An image that accompanied the communication also teased Tesla’s updated and optimized Sirius XM UI for its vehicles. Following is the email’s text.
“Beginning now, enjoy a free, All Access three-month trial subscription to Sirius XM, plus a completely new look and improved functionality. Our latest over-the-air software update includes significant improvements to overall Sirius XM navigation, organization, and search features, including access to more than 150 satellite channels.
“To access simply tap the Sirius XM app from the ‘Music’ section of your in-car center touchscreen—or enjoy your subscription online, on your phone, or at home on connected devices. If you can’t hear SiriusXM channels in your car, select the Sirius XM ‘Subscription’ tab for instruction on how to refresh your audio.”
Tesla has actually been working on Sirius XM improvements for some time now. Back in June, for example, Tesla rolled out its 2020.24.6.4 update, and it included some optimizations to its Model S and Model X’s Sirius XM interface. As noted by noted Tesla owner and hacker @greentheonly, the source code of this update revealed that the Sirius XM optimizations were also intended to be released to other areas such as Canada.
Interestingly enough, Sirius XM is a popular feature that has been exclusive to the Model S and X. Tesla’s most popular vehicle to date, the Model 3, is yet to receive the feature. One could only hope that Sirius XM integration to the Model 3 may eventually be included in the future. Such an update would most definitely be appreciated by the EV community, especially since some Model 3 owners have resorted to using their smartphones or third-party solutions to gain access to the satellite radio service.
The fact that Tesla seems to be pushing Sirius XM rather assertively to its customers seems to suggest that the company may be poised to roll out more entertainment-based apps in the coming months. Apps such as Sirius XM, Spotify, Netflix, and YouTube, may seem quite minor when compared to key functions like Autopilot, after all, but they do help round out the ownership experience of Tesla owners. In a way, Sirius XM does make sense for Tesla’s next-generation of vehicles, especially the Cybertruck and the Semi, both of which would likely be driven in areas that lack LTE connectivity.
These Tesla, X, and xAI engineers were just poached by OpenAI

SpaceX share sale expected to back $400 billion valuation

Tesla Giga Texas continues to pile up with Cybercab castings



-

 Elon Musk1 week ago
Elon Musk1 week agoTesla investors will be shocked by Jim Cramer’s latest assessment
-

 News2 weeks ago
News2 weeks agoTesla Robotaxi’s biggest challenge seems to be this one thing
-

 Elon Musk1 day ago
Elon Musk1 day agoElon Musk confirms Grok 4 launch on July 9 with livestream event
-

 News2 weeks ago
News2 weeks agoWatch the first true Tesla Robotaxi intervention by safety monitor
-

 News5 days ago
News5 days agoTesla Model 3 ranks as the safest new car in Europe for 2025, per Euro NCAP tests
-

 Elon Musk2 weeks ago
Elon Musk2 weeks agoA Tesla just delivered itself to a customer autonomously, Elon Musk confirms
-

 Elon Musk2 weeks ago
Elon Musk2 weeks agoElon Musk confirms Tesla Optimus V3 already uses Grok voice AI
-

 Elon Musk2 weeks ago
Elon Musk2 weeks agoxAI welcomes Memphis pollution results, environmental groups push back